































Abderahman Rejeb a , Alireza Abdollahi b , Karim Rejeb c , Horst Treiblmaier d,
- a ພາກວິຊາການຄຸ້ມຄອງ ແລະກົດໝາຍ, ຄະນະເສດຖະສາດ, ມະຫາວິທະຍາໄລ Rome Tor Vergata, Via Columbia, 2, Rome 00133, Italy
- b ພາກວິຊາບໍລິຫານທຸລະກິດ, ຄະນະບໍລິຫານ, ມະຫາວິທະຍາໄລ Kharazmi, 1599964511 Tehran, Iran
- c ຄະນະວິທະຍາສາດຂອງ Bizerte, ມະຫາວິທະຍາໄລ Carthage, Zarzouna, 7021 Bizerte, Tunisia
- d ໂຮງຮຽນການຄຸ້ມຄອງສາກົນ, ມະຫາວິທະຍາໄລ Modul Vienna, Am Kahlenberg 1, 1190 Vienna, Austria
| ຂໍ້ມູນບົດຄວາມ | ປະຫວັດຄວາມເປັນມາ |
| Keywords: Drones UAV ການກະເສດທີ່ຖືກຕ້ອງ ອິນເຕີເນັດຂອງສິ່ງທີ່ Bibliometrics | Drones, ເຊິ່ງເອີ້ນກັນວ່າ Unmanned Aerial Vehicles (UAV), ໄດ້ເຫັນການພັດທະນາທີ່ໂດດເດັ່ນໃນທົດສະວັດທີ່ຜ່ານມາ. ໃນການກະສິກໍາ, ພວກເຂົາເຈົ້າໄດ້ປ່ຽນແປງການປະຕິບັດການກະສິກໍາໂດຍສະເຫນີໃຫ້ຊາວກະສິກອນປະຫຍັດຕົ້ນທຶນຫຼາຍ, ເພີ່ມຂຶ້ນ ປະສິດທິພາບການດໍາເນີນງານ, ແລະກໍາໄລທີ່ດີກວ່າ. ໃນໄລຍະທົດສະວັດທີ່ຜ່ານມາ, ຫົວຂໍ້ຂອງ drones ກະສິກໍາມີ ດຶງດູດຄວາມສົນໃຈທາງວິຊາການທີ່ຫນ້າສັງເກດ. ດັ່ງນັ້ນພວກເຮົາດໍາເນີນການທົບທວນທີ່ສົມບູນແບບໂດຍອີງໃສ່ bibliometrics ເພື່ອສະຫຼຸບແລະໂຄງສ້າງວັນນະຄະດີທາງວິຊາການທີ່ມີຢູ່ແລ້ວແລະເປີດເຜີຍແນວໂນ້ມການຄົ້ນຄວ້າໃນປະຈຸບັນແລະຈຸດຮ້ອນ. ພວກເຮົາ ນໍາໃຊ້ເຕັກນິກ bibliometric ແລະວິເຄາະວັນນະຄະດີອ້ອມຂ້າງ drones ກະສິກໍາເພື່ອສະຫຼຸບແລະ ປະເມີນການຄົ້ນຄວ້າທີ່ຜ່ານມາ. ການວິເຄາະຂອງພວກເຮົາຊີ້ໃຫ້ເຫັນວ່າການຮັບຮູ້ຫ່າງໄກສອກຫຼີກ, ການກະສິກໍາທີ່ຊັດເຈນ, ການຮຽນຮູ້ເລິກ, ການຮຽນຮູ້ເຄື່ອງຈັກ, ແລະອິນເຕີເນັດຂອງສິ່ງຕ່າງໆແມ່ນຫົວຂໍ້ທີ່ສໍາຄັນທີ່ກ່ຽວຂ້ອງກັບ drones ກະສິກໍາ. ການອ້າງອິງຮ່ວມກັນ ການວິເຄາະເປີດເຜີຍຫົກກຸ່ມການຄົ້ນຄວ້າຢ່າງກວ້າງຂວາງໃນວັນນະຄະດີ. ການສຶກສານີ້ແມ່ນຫນຶ່ງໃນຄວາມພະຍາຍາມທໍາອິດທີ່ຈະສະຫຼຸບການຄົ້ນຄວ້າ drone ໃນກະສິກໍາແລະແນະນໍາທິດທາງການຄົ້ນຄວ້າໃນອະນາຄົດ. |
ການນໍາສະເຫນີ
ການກະເສດເປັນຕົວແທນຂອງແຫຼ່ງອາຫານຫຼັກຂອງໂລກ (Friha et al., 2021), ແລະມັນໄດ້ປະເຊີນກັບສິ່ງທ້າທາຍອັນຮ້າຍແຮງອັນເນື່ອງມາຈາກ
ຄວາມຕ້ອງການເພີ່ມຂຶ້ນຂອງຜະລິດຕະພັນສະບຽງອາຫານ, ຄວາມປອດໄພຂອງສະບຽງອາຫານ, ແລະຄວາມກັງວົນຄວາມປອດໄພເຊັ່ນດຽວກັນກັບການຮຽກຮ້ອງໃຫ້ມີການປົກປັກຮັກສາສິ່ງແວດລ້ອມ, ການປົກປັກຮັກສານ້ໍາ, ແລະ.
ຄວາມຍືນຍົງ (Inoue, 2020). ການພັດທະນານີ້ຄາດຄະເນວ່າຈະສືບຕໍ່ນັບຕັ້ງແຕ່ປະຊາກອນໂລກຄາດຄະເນວ່າຈະບັນລຸ 9.7 ຕື້ໃນປີ 2050
(2019). ເນື່ອງຈາກການກະສິກໍາເປັນຕົວຢ່າງທີ່ໂດດເດັ່ນທີ່ສຸດຂອງການບໍລິໂພກນ້ໍາໃນທົ່ວໂລກ, ຄາດວ່າຄວາມຕ້ອງການອາຫານແລະນ້ໍາ
ການບໍລິໂພກຈະເພີ່ມຂຶ້ນຢ່າງຫຼວງຫຼາຍໃນອະນາຄົດທີ່ຄາດໄວ້. ນອກຈາກນັ້ນ, ການເພີ່ມຂຶ້ນຂອງການບໍລິໂພກຝຸ່ນແລະຢາປາບສັດຕູພືດ
ບວກກັບການຂະຫຍາຍຕົວຂອງການເຄື່ອນໄຫວກະສິກໍາສາມາດນໍາໄປສູ່ການທ້າທາຍສິ່ງແວດລ້ອມໃນອະນາຄົດ. ເຊັ່ນດຽວກັນ, ທີ່ດິນປູກຝັງແມ່ນຈໍາກັດ, ແລະ
ຈໍານວນຊາວກະສິກອນແມ່ນຫຼຸດລົງໃນທົ່ວໂລກ. ສິ່ງທ້າທາຍເຫຼົ່ານີ້ເນັ້ນເຖິງຄວາມຈຳເປັນໃນການແກ້ໄຂການກະສິກຳທີ່ມີຫົວຄິດປະດິດສ້າງ ແລະຍືນຍົງ (ເອລີຢາ
et al., 2018; Friha et al., 2021; Inoue, 2020; Tzounis et al., 2017).
ການລວມເອົາເທກໂນໂລຍີນະວັດຕະກໍາໄດ້ຖືກລະບຸວ່າເປັນການແກ້ໄຂທີ່ໂດດເດັ່ນເພື່ອແກ້ໄຂສິ່ງທ້າທາຍເຫຼົ່ານີ້. ການປູກຝັງອັດສະລິຍະ (Brewster et al.,
ປີ 2017; Tang et al., 2021) ແລະການກະສິກໍາຄວາມແມ່ນຍໍາ (Feng et al., 2019; Khanna & Kaur, 2019) ໄດ້ອອກມາເປັນຜົນມາຈາກການໂຕ້ວາທີດັ່ງກ່າວ. ໄດ້
ອະດີດແມ່ນແນວຄິດທົ່ວໄປສໍາລັບການຮັບຮອງເອົາເຕັກໂນໂລຢີການສື່ສານຂໍ້ມູນຂ່າວສານ (ICT) ແລະການປະດິດສ້າງທີ່ທັນສະໄຫມອື່ນໆໃນກິດຈະກໍາກະສິກໍາເພື່ອເພີ່ມປະສິດຕິພາບແລະປະສິດທິພາບ (Haque et al., 2021). ອັນສຸດທ້າຍແມ່ນສຸມໃສ່ການຄຸ້ມຄອງສະຖານທີ່ສະເພາະທີ່ທີ່ດິນແບ່ງອອກເປັນ
ພາກສ່ວນທີ່ເປັນເນື້ອດຽວກັນ, ແລະແຕ່ລະພາກສ່ວນໄດ້ຮັບຈໍານວນທີ່ແນ່ນອນຂອງວັດສະດຸປ້ອນກະສິກໍາສໍາລັບການເພີ່ມປະສິດທິພາບຂອງຜົນຜະລິດພືດໂດຍເຕັກໂນໂລຢີໃຫມ່ (Feng et al., 2019; Khanna & Kaur, 2019). ເຕັກໂນໂລຢີທີ່ໂດດເດັ່ນທີ່ໄດ້ດຶງດູດຄວາມສົນໃຈຂອງນັກວິຊາການໃນຂົງເຂດນີ້ປະກອບມີ Wireless Sensor Networks (WSNs) (J. Zheng & Yang, 2018; Y. Zhou et al., 2016), Internet of Things (IoT) (Gill et al., 2017; He et al., 2021; Liu et al., 2019),
ເຕັກນິກປັນຍາປະດິດ (AI) ລວມທັງການຮຽນຮູ້ເຄື່ອງຈັກ ແລະການຮຽນຮູ້ເລິກເຊິ່ງ (Liakos et al., 2018; Parsaeian et al., 2020; Shadrin et al.,
2019), ເຕັກໂນໂລຊີຄອມພິວເຕີ (Hsu et al., 2020; Jinbo et al., 2019; Zamora-Izquierdo et al., 2019), ຂໍ້ມູນໃຫຍ່ (Gill et al., 2017; Tantalaki
et al., 2019), ແລະ blockchain (PW Khan et al., 2020; Pincheira et al., 2021).
ນອກ ເໜືອ ໄປຈາກເຕັກໂນໂລຢີທີ່ກ່າວມາຂ້າງເທິງ, ການຮັບຮູ້ທາງໄກໄດ້ຖືກພິຈາລະນາເປັນເຄື່ອງມືເຕັກໂນໂລຢີທີ່ມີທ່າແຮງສູງໃນການປັບປຸງ.
ການກະເສດທີ່ສະຫຼາດ ແລະຊັດເຈນ. ດາວທຽມ, ເຮືອບິນທີ່ສົ່ງດ້ວຍມະນຸດ, ແລະ drones ເປັນເຕັກໂນໂລຊີການຮັບຮູ້ທາງໄກທີ່ເປັນທີ່ນິຍົມ (Tsouros et al., 2019).
ເຮືອບິນບໍ່ມີຄົນຂັບ, ເປັນທີ່ຮູ້ຈັກກັນດີໃນນາມຍານຍົນບໍ່ມີຄົນຂັບ (UAVs), ລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ (UAS), ແລະເຮືອບິນທີ່ບິນຈາກໄລຍະໄກ.
ຄວາມສໍາຄັນທີ່ຍິ່ງໃຫຍ່ຍ້ອນວ່າພວກເຂົາມີຂໍ້ໄດ້ປຽບຫຼາຍໃນການປຽບທຽບກັບເຕັກໂນໂລຢີການຮັບຮູ້ທາງໄກອື່ນໆ. ສໍາລັບຕົວຢ່າງ, drones ສາມາດສົ່ງ
ຮູບພາບທີ່ມີຄຸນນະພາບສູງແລະຄວາມລະອຽດສູງໃນມື້ທີ່ມີເມກ (Manfreda et al., 2018). ນອກຈາກນີ້, ມີແລະຄວາມໄວການໂອນຂອງເຂົາເຈົ້າປະກອບເປັນອື່ນໆ
ຜົນປະໂຫຍດ (Radoglou-Grammatikis et al., 2020). ເມື່ອປຽບທຽບກັບເຮືອບິນ, drones ແມ່ນມີຄ່າໃຊ້ຈ່າຍສູງແລະງ່າຍຕໍ່ການຕິດຕັ້ງແລະຮັກສາ (Tsouros et al., 2019). ເຖິງວ່າຈະມີການນໍາໃຊ້ໃນເບື້ອງຕົ້ນເພື່ອຈຸດປະສົງທາງທະຫານ, drones ສາມາດໃຫ້ຜົນປະໂຫຍດຕໍ່ການນໍາໃຊ້ພົນລະເຮືອນຈໍານວນຫລາຍ, ຕົວຢ່າງເຊັ່ນໃນການຄຸ້ມຄອງລະບົບຕ່ອງໂສ້ການສະຫນອງ (A. Rejeb, Rejeb, et al., 2021a), ສໍາລັບຈຸດປະສົງດ້ານມະນຸດສະທໍາ (A. Rejeb, Rejeb, et al., 2021c), ກະສິກໍາອັດສະລິຍະ, ການສໍາຫຼວດ ແລະການສ້າງແຜນທີ່, ເອກະສານມໍລະດົກວັດທະນະທໍາ, ການຄຸ້ມຄອງໄພພິບັດ, ແລະການອະນຸລັກປ່າໄມ້ ແລະສັດປ່າ (Panday, Pratihast, et al., 2020). ໃນຂົງເຂດກະສິກໍາ, ພື້ນທີ່ນໍາໃຊ້ drones ຈໍານວນຫຼາຍມີຢູ່ຍ້ອນວ່າພວກເຂົາສາມາດປະສົມປະສານກັບເຕັກໂນໂລຢີໃຫມ່, ຄວາມສາມາດຂອງຄອມພິວເຕີ້, ແລະເຊັນເຊີເທິງເຮືອເພື່ອສະຫນັບສະຫນູນການຄຸ້ມຄອງພືດ (ຕົວຢ່າງ, ແຜນທີ່, ການຕິດຕາມ, ຊົນລະປະທານ, ການວິນິດໄສພືດ) (H. Huang et al., 2021) , ການຫຼຸດຜ່ອນໄພພິບັດ, ລະບົບການເຕືອນໄພລ່ວງຫນ້າ, ການອະນຸລັກສັດປ່າແລະປ່າໄມ້ເພື່ອຊື່ຈໍານວນຫນ້ອຍ (Negash et al., 2019). ເຊັ່ນດຽວກັນ, drones ສາມາດຖືກນໍາໄປໃຊ້ໃນກິດຈະກໍາກະສິກໍາຈໍານວນຫນຶ່ງ, ລວມທັງການຕິດຕາມການປູກພືດແລະການຂະຫຍາຍຕົວ, ການຄາດຄະເນຜົນຜະລິດ, ການປະເມີນຄວາມກົດດັນນ້ໍາ, ແລະຫຍ້າ, ສັດຕູພືດ, ແລະການກວດຫາພະຍາດ (Inoue, 2020; Panday, Pratihast, et al., 2020). ບໍ່ພຽງແຕ່ drones ສາມາດຖືກນໍາໃຊ້ເພື່ອຈຸດປະສົງການຕິດຕາມ, ການຄາດຄະເນ, ແລະການກວດສອບໂດຍອີງໃສ່ຂໍ້ມູນ sensory ຂອງເຂົາເຈົ້າ, ແຕ່ຍັງສໍາລັບການຊົນລະປະທານທີ່ມີຄວາມແມ່ນຍໍາແລະຄວາມແມ່ນຍໍາຂອງຫຍ້າ, ສັດຕູພືດ, ແລະການຄຸ້ມຄອງພະຍາດ. ໃນຄໍາສັບຕ່າງໆອື່ນໆ, drones ສາມາດສີດນ້ໍາແລະຢາຂ້າແມງໄມ້ໃນປະລິມານທີ່ຊັດເຈນໂດຍອີງໃສ່ຂໍ້ມູນສິ່ງແວດລ້ອມ. ຜົນປະໂຫຍດຂອງ drones ໃນການກະສິກໍາແມ່ນໄດ້ສະຫຼຸບໃນຕາຕະລາງ 1.
ຜົນປະໂຫຍດຕົ້ນຕໍຂອງ drones ໃນການກະສິກໍາ.
| ຜົນປະໂຫຍດ | ອ້າງອີງ |
| ເສີມຂະຫຍາຍການທາງໂລກແລະທາງກວ້າງຂວາງ ຄວາມລະອຽດການຮັບຮູ້ | (Gago et al., 2015; Niu et al., 2020; Srivastava et al, 2020) |
| ອໍານວຍຄວາມສະດວກທາງດ້ານກະສິກໍາທີ່ຊັດເຈນ | (L. Deng et al., 2018; Kalischuk et al., 2019; Maimaitijiang et al., 2017) |
| ການຈັດປະເພດແລະ scouting ຂອງ ການປູກພືດ | (Inoue, 2020; Kalischuk et al., 2019; Lopez-´ Granados et al., 2016; Maimaitijiang et al., 2017; Melville et al., 2019; Moharana & Dutta, 2016) |
| ການນໍາໃຊ້ຝຸ່ນ | (L. Deng et al., 2018; Guan et al., 2019) |
| ຕິດຕາມໄພແຫ້ງແລ້ງ | (Fawcett et al., 2020; Panday, Pratihast, et al., 2020; Su et al., 2018) |
| ການຄາດຄະເນຊີວະມວນ | (Bendig et al., 2014) |
| ການຄາດຄະເນຜົນຜະລິດໄດ້ | (Inoue, 2020; Panday, Shrestha, et al., 2020; Tao et al, 2020) |
| ການຫຼຸດຜ່ອນໄພພິບັດ | (Negash et al., 2019) |
| ການອະນຸລັກສັດປ່າ ແລະ ປ່າໄມ້ | (Negash et al., 2019; Panday, Pratihast, et al., 2020) |
| ການປະເມີນຄວາມກົດດັນຂອງນ້ໍາ | (Inoue, 2020; J. Su, Coombes, et al., 2018; L. Zhang et al., 2019) |
| ສັດຕູພືດ, ພືດ, ແລະພະຍາດ ການກວດພົບ | (Gaˇsparovi'c et al., 2020; Inoue, 2020; J. Su, Liu, et al., 2018; X. Zhang et al., 2019) |
ໃນທາງກົງກັນຂ້າມ, drones ປະເຊີນກັບຂໍ້ຈໍາກັດເຊັ່ນດຽວກັນ. ການມີສ່ວນຮ່ວມຂອງນັກບິນ, ພະລັງງານຂອງເຄື່ອງຈັກ, ຄວາມຫມັ້ນຄົງແລະຄວາມຫນ້າເຊື່ອຖື, ຄຸນນະພາບຂອງເຊັນເຊີເນື່ອງຈາກ payload
ຂໍ້ຈໍາກັດນ້ໍາຫນັກ, ຄ່າໃຊ້ຈ່າຍໃນການປະຕິບັດ, ແລະກົດລະບຽບການບິນ, ໃນບັນດາພວກເຂົາ (C. Zhang & Kovacs, 2012). ພວກເຮົາປຽບທຽບຂໍ້ບົກຜ່ອງ
ຂອງສາມເຕັກໂນໂລຊີການຮັບຮູ້ທາງໄກມືຖືຢູ່ໃນຕາຕະລາງ 2. ເຕັກໂນໂລຊີການຮັບຮູ້ທາງໄກອື່ນໆ, ເຊັ່ນເຊັນເຊີດິນ, ແມ່ນເກີນຈຸດສຸມໃສ່ຂອງການສຶກສານີ້.
ຂໍ້ບົກຜ່ອງຂອງເທັກໂນໂລຍີການຮັບຮູ້ທາງໄກຂອງມືຖືຕ່າງໆ.
| ຄວາມຮູ້ສຶກໄລຍະໄກ ເຕັກໂນໂລຊີ | ຂໍ້ບົກພ່ອງ | ເອກະສານ |
| Drone (UAV) | ການມີສ່ວນຮ່ວມຂອງນັກບິນ; ຮູບພາບ ຄຸນນະພາບ (ສະເລ່ຍ); ຄ່າໃຊ້ຈ່າຍໃນການປະຕິບັດ (ສະເລ່ຍ); ສະຖຽນລະພາບ, maneuverability, ແລະ ຄວາມຫນ້າເຊື່ອຖື; ມາດຕະຖານ; ພະລັງງານເຄື່ອງຈັກ; ພະລັງງານຈໍາກັດ ແຫຼ່ງ (ຄວາມທົນທານຂອງຫມໍ້ໄຟ); ໄລຍະເວລາການບິນຈໍາກັດ, ການປະທະກັນ ແລະການໂຈມຕີທາງອິນເຕີເນັດ; ຈຳກັດ ນ້ໍາຫນັກ payload; ຊຸດຂໍ້ມູນຂະຫນາດໃຫຍ່ ແລະການປະມວນຜົນຂໍ້ມູນຈໍາກັດ ຄວາມສາມາດ; ຂາດລະບຽບ; ຂາດຄວາມຊໍານານ, ເຂົ້າສູງ ອຸປະສັກໃນການເຂົ້າເຖິງ drones ກະເສດ; | (Bacco et al., 2018; Dawaliby et al., 2020; Hardin & Hardin, 2010; Hardin & Jensen, 2011; Lagkas et al., ປີ 2018; Laliberte et al., 2007; Laliberte & Rango, 2011; Manfreda et al., 2018, 2018; Nebiker et al., 2008; ປູຣິ et al., 2017; Velusamy et al., 2022; C. Zhang & Kovacs, 2012) |
| ດາວທຽມ | ການຄຸ້ມຄອງດາວທຽມເປັນໄລຍະ, ຄວາມລະອຽດ spectral ຈໍາກັດ; ຄວາມສ່ຽງຕໍ່ບັນຫາການເບິ່ງເຫັນ (ຕົວຢ່າງ, ຟັງ); ຄວາມບໍ່ພ້ອມ ແລະຄວາມໄວການໂອນຕ່ໍາ; ປະຖົມນິເທດແລະ vignetting ຜົນກະທົບຂໍ້ມູນທາງກວ້າງຂອງພື້ນທີ່ມີລາຄາແພງ ການເກັບກໍາ; ການຈັດສົ່ງຂໍ້ມູນຊ້າ ເວລາແກ່ຜູ້ໃຊ້ສຸດທ້າຍ | (Aboutalebi et al., 2019; Cen et al., 2019; Chen et al., 2019; Nansen & Elliott, ປີ 2016; Panday, Pratihast, et al., 2020; ໄຊວິເນດ et al, 2019) |
| ເຮືອບິນ | ຄ່າໃຊ້ຈ່າຍໃນການຮັບຮອງເອົາສູງ; ການຕັ້ງຄ່າສັບສົນ; ຄ່າໃຊ້ຈ່າຍໃນການບໍາລຸງຮັກສາ; ຄວາມບໍ່ມີທີ່ເຊື່ອຖືໄດ້ ຍົນ, ເລຂາຄະນິດຂອງ ຮູບພາບ; ຂໍ້ມູນບໍ່ປົກກະຕິ ການໄດ້ມາ; ຂາດຄວາມຍືດຫຍຸ່ນ; ອຸບັດເຫດຕາຍຕົວ; ຂໍ້ມູນເຊັນເຊີ ການປ່ຽນແປງເນື່ອງຈາກການສັ່ນສະເທືອນ; ບັນຫາການອ້າງອີງທາງພູມສາດ | (Armstrong et al., 2011; Atkinson et al., 2018; Barbedo & Koenigkan, 2018; Kovalev ແລະ Voroshilova, 2020; Suomalainen et al., ປີ 2013; Thamm et al., 2013) |
ໃນຖານະເປັນເຕັກໂນໂລຢີອະເນກປະສົງແລະອະເນກປະສົງໃນການກະສິກໍາ, drones ໄດ້ຖືກສືບສວນຈາກທັດສະນະຕ່າງໆ. ຕົວຢ່າງ, ນັກວິຊາການໄດ້ກວດເບິ່ງຄໍາຮ້ອງສະຫມັກ drone ໃນກະສິກໍາ (Kulbacki et al., 2018; Mogili & Deepak, 2018), ການປະກອບສ່ວນຂອງເຂົາເຈົ້າໃນການກະສິກໍາຄວາມແມ່ນຍໍາ (Puri et al., 2017; Tsouros et al., 2019), ການປະກອບຂອງເຂົາເຈົ້າກັບອື່ນໆ. ເທັກໂນໂລຢີທີ່ທັນສະໄໝ (Al-Thani et al., 2020; Dutta & Mitra, 2021; Nayyar et al., 2020; Saha et al., 2018), ແລະຄວາມເປັນໄປໄດ້ຂອງຄວາມກ້າວໜ້າໃນການນໍາທາງ ແລະຄວາມສາມາດຮັບຮູ້ (Bareth et. , 2015; Suomalainen et al., 2014). ນັບຕັ້ງແຕ່ການຄົ້ນຄວ້າກ່ຽວກັບການນໍາໃຊ້ drone ໃນກະສິກໍາໄດ້ກາຍເປັນທີ່ແຜ່ຫຼາຍ (Khan et al., 2021)), ມັນຈໍາເປັນຕ້ອງໄດ້ສະຫຼຸບວັນນະຄະດີທີ່ມີຢູ່ແລ້ວແລະເປີດເຜີຍໂຄງສ້າງທາງປັນຍາຂອງໂດເມນ. ນອກຈາກນັ້ນ, ໃນຖານະທີ່ເປັນຂົງເຂດເຕັກໂນໂລຢີສູງທີ່ມີການປັບປຸງຢ່າງຕໍ່ເນື່ອງ, ການທົບທວນຄືນທີ່ມີໂຄງສ້າງຈໍາເປັນຕ້ອງໄດ້ດໍາເນີນການເພື່ອສະຫຼຸບສັງລວມວັນນະຄະດີທີ່ມີຢູ່ແລ້ວແລະກໍານົດຊ່ອງຫວ່າງການຄົ້ນຄວ້າທີ່ສໍາຄັນ. ເຖິງ
ວັນທີ, ມີການທົບທວນຄືນຈໍານວນຫນ້ອຍທີ່ປຶກສາຫາລືຄໍາຮ້ອງສະຫມັກ drone ໃນຂະແຫນງການກະສິກໍາ. ຕົວຢ່າງ, Mogili ແລະ Deepak (2018) ສະຫຼຸບໂດຍຫຍໍ້ກ່ຽວກັບຜົນກະທົບຂອງການຕິດຕາມພືດແລະການສີດຢາຂ້າແມງໄມ້. Inoue (2020) ດໍາເນີນການທົບທວນການນໍາໃຊ້ດາວທຽມແລະ drone ໃນການຮັບຮູ້ທາງໄກໃນກະສິກໍາ. ຜູ້ຂຽນສຳຫຼວດຄວາມທ້າທາຍດ້ານເທັກໂນໂລຢີຂອງການນຳໃຊ້ກະສິກຳອັດສະລິຍະ ແລະການປະກອບສ່ວນຂອງດາວທຽມ ແລະ drones ໂດຍອີງໃສ່ກໍລະນີສຶກສາ ແລະການປະຕິບັດທີ່ດີທີ່ສຸດ. Tsouros et al. (2019) ສະຫຼຸບປະເພດຕ່າງໆຂອງ drones ແລະການນໍາໃຊ້ຕົ້ນຕໍຂອງເຂົາເຈົ້າໃນກະສິກໍາ, ເນັ້ນຫນັກເຖິງການມາຂໍ້ມູນແລະວິທີການປະມວນຜົນຕ່າງໆ. ບໍ່ດົນມານີ້, Aslan et al. (2022) ໄດ້ດໍາເນີນການທົບທວນທີ່ສົມບູນແບບຂອງຄໍາຮ້ອງສະຫມັກ UAV ໃນກິດຈະກໍາການກະສິກໍາແລະເນັ້ນຫນັກເຖິງຄວາມກ່ຽວຂ້ອງຂອງທ້ອງຖິ່ນພ້ອມໆກັນແລະການສ້າງແຜນທີ່ສໍາລັບ UAV ໃນເຮືອນແກ້ວ. Diaz-Gonzalez et al. (2022) ໄດ້ທົບທວນຄືນການສຶກສາທີ່ຜ່ານມາກ່ຽວກັບການຜະລິດຜົນຜະລິດພືດໂດຍອີງໃສ່ເຕັກນິກການຮຽນຮູ້ເຄື່ອງຈັກທີ່ແຕກຕ່າງກັນແລະຫ່າງໄກສອກຫຼີກ
ລະບົບການຮັບຮູ້. ການຄົ້ນພົບຂອງພວກເຂົາຊີ້ໃຫ້ເຫັນວ່າ UAVs ມີປະໂຫຍດໃນການຄາດຄະເນຕົວຊີ້ວັດຂອງດິນແລະປະຕິບັດລະບົບດາວທຽມໃນແງ່ຂອງຄວາມລະອຽດທາງພື້ນທີ່, ຂໍ້ມູນຊົ່ວຄາວແລະຄວາມຍືດຫຍຸ່ນ. Basiri et al. (2022) ໄດ້ທົບທວນຄືນຢ່າງຄົບຖ້ວນກ່ຽວກັບວິທີການແລະວິທີການຕ່າງໆເພື່ອເອົາຊະນະສິ່ງທ້າທາຍການວາງແຜນເສັ້ນທາງສໍາລັບ UAVs ຫຼາຍ rotor ໃນສະພາບການກະສິກໍາຄວາມແມ່ນຍໍາ. ຍິ່ງໄປກວ່ານັ້ນ, Awais et al. (2022) ໄດ້ສະຫຼຸບການນໍາໃຊ້ຂໍ້ມູນການຮັບຮູ້ທາງໄກ UAV ໃນການປູກພືດເພື່ອຄາດຄະເນສະຖານະການນ້ໍາແລະສະຫນອງການສັງເຄາະໃນຄວາມເລິກຂອງຄວາມອາດສາມາດໃນອະນາຄົດຂອງການຮັບຮູ້ທາງໄກ UAV ສໍາລັບຄໍາຮ້ອງສະຫມັກຄວາມກົດດັນສິ່ງເສດເຫຼືອ. ສຸດທ້າຍ, Aquilani et al. (2022) ໄດ້ທົບທວນຄືນເຕັກໂນໂລຊີການລ້ຽງສັດແບບ prevision ທີ່ໃຊ້ໃນລະບົບການລ້ຽງສັດຕາມທົ່ງຫຍ້າລ້ຽງສັດແລະໄດ້ຄາດຄະເນວ່າການຮັບຮູ້ທາງໄກທີ່ເປີດໃຊ້ໂດຍ UAVs ແມ່ນມີປະໂຫຍດສໍາລັບການປະເມີນຊີວະມວນແລະການຄຸ້ມຄອງຝູງສັດ.
ນອກຈາກນີ້, ຄວາມພະຍາຍາມເພື່ອນໍາໃຊ້ UAVs ໃນການຕິດຕາມ, ຕິດຕາມ, ແລະການລວບລວມສັດລ້ຽງໄດ້ຖືກລາຍງານບໍ່ດົນມານີ້.
ເຖິງແມ່ນວ່າການທົບທວນຄືນເຫຼົ່ານີ້ຈະໃຫ້ຄວາມເຂົ້າໃຈໃຫມ່ແລະທີ່ສໍາຄັນ, ບໍ່ມີການທົບທວນຄືນທີ່ສົມບູນແບບແລະທັນສະໄຫມໂດຍອີງໃສ່ bibliometrics ສາມາດພົບເຫັນຢູ່ໃນວັນນະຄະດີ, ເຊິ່ງສະເຫນີຊ່ອງຫວ່າງຄວາມຮູ້ທີ່ຊັດເຈນ. ຍິ່ງໄປກວ່ານັ້ນ, ມັນໄດ້ຖືກລະບຸໄວ້ວ່າໃນເວລາທີ່ການຜະລິດທາງວິຊາການເຕີບໂຕໃນໂດເມນວິທະຍາສາດ, ມັນເປັນສິ່ງສໍາຄັນສໍາລັບນັກຄົ້ນຄວ້າທີ່ຈະໃຊ້ວິທີການທົບທວນປະລິມານເພື່ອເຂົ້າໃຈໂຄງສ້າງຄວາມຮູ້ຂອງໂດເມນ (Rivera & Pizam, 2015). ເຊັ່ນດຽວກັນ, Ferreira et al. (2014) ໄດ້ໂຕ້ແຍ້ງວ່າ ຂະແໜງຄົ້ນຄວ້າທີ່ໃຫຍ່ຂຶ້ນ ແລະ ມີຄວາມຊັບຊ້ອນ, ນັກວິຊາການຄວນຕັ້ງເປົ້າໝາຍໃຫ້ຄວາມຮູ້ທີ່ສ້າງຂຶ້ນ ແລະ ລວບລວມເປັນບາງຄັ້ງຄາວ ເພື່ອເປີດເຜີຍການປະກອບສ່ວນໃໝ່, ຈັບເອົາຮີດຄອງປະເພນີ ແລະ ທ່າອ່ຽງຂອງການຄົ້ນຄວ້າ, ກຳນົດຫົວຂໍ້ທີ່ສຶກສາ ແລະ ເຈາະເລິກເຖິງໂຄງສ້າງຄວາມຮູ້ຂອງ. ພາກສະຫນາມແລະທິດທາງການຄົ້ນຄວ້າທີ່ເປັນໄປໄດ້. ໃນຂະນະທີ່ Raparelli ແລະ Bajocco (2019) ໄດ້ດໍາເນີນການວິເຄາະ bibliometric ເພື່ອກວດເບິ່ງໂດເມນຄວາມຮູ້ຂອງການນໍາໃຊ້ drone ໃນກະສິກໍາແລະປ່າໄມ້, ການສຶກສາຂອງພວກເຂົາພຽງແຕ່ພິຈາລະນາການຄົ້ນຄວ້າທາງວິຊາການທີ່ຈັດພີມມາລະຫວ່າງ 1995 ແລະ 2017, ເຊິ່ງບໍ່ໄດ້ສະທ້ອນເຖິງນະໂຍບາຍດ້ານຂອງພື້ນທີ່ທີ່ມີການເຄື່ອນໄຫວໄວນີ້. ນອກຈາກນັ້ນ, ຜູ້ຂຽນບໍ່ໄດ້ພະຍາຍາມກໍານົດການປະກອບສ່ວນທີ່ມີອິດທິພົນທີ່ສຸດໃນຂົງເຂດ, ຈັດກຸ່ມວັນນະຄະດີ, ແລະປະເມີນໂຄງສ້າງທາງປັນຍາໂດຍໃຊ້ການວິເຄາະການອ້າງອີງຮ່ວມກັນ. ດັ່ງນັ້ນ, ມັນຈໍາເປັນຕ້ອງໄດ້ສະຫຼຸບວັນນະຄະດີເພື່ອເປີດເຜີຍ foci ການຄົ້ນຄວ້າໃນປະຈຸບັນ, ແນວໂນ້ມ, ແລະຈຸດຮ້ອນ.
ເພື່ອຕື່ມຂໍ້ມູນໃສ່ຊ່ອງຫວ່າງຄວາມຮູ້ນີ້, ພວກເຮົານໍາໃຊ້ວິທີການປະລິມານແລະວິທີການ bibliometric ທີ່ເຄັ່ງຄັດເພື່ອກວດກາເບິ່ງສະຖານະການໃນປະຈຸບັນຂອງການຄົ້ນຄວ້າຢູ່ຈຸດຕັດກັນຂອງ drones ແລະກະສິກໍາ. ພວກເຮົາໂຕ້ຖຽງວ່າການສຶກສາໃນປະຈຸບັນເຮັດໃຫ້ການປະກອບສ່ວນຫຼາຍຢ່າງໃຫ້ກັບວັນນະຄະດີທີ່ມີຢູ່ແລ້ວໂດຍການກວດສອບເຕັກໂນໂລຢີທີ່ພົ້ນເດັ່ນຂື້ນເຊິ່ງມີຄວາມຈໍາເປັນສູງໃນກະສິກໍາຍ້ອນວ່າມັນສະຫນອງທ່າແຮງອັນໃຫຍ່ຫຼວງທີ່ຈະປ່ຽນແປງຫຼາຍດ້ານໃນຂະແຫນງການນີ້. ຄວາມຕ້ອງການສໍາລັບການວິເຄາະ bibliometric ຂອງ drones ກະສິກໍາແມ່ນມີຄວາມຮູ້ສຶກເພີ່ມເຕີມຕໍ່ກັບຄວາມຮູ້ກະແຈກກະຈາຍແລະ fragmented ກ່ຽວກັບ drones ໃນສະພາບການກະສິກໍາ. ເຊັ່ນດຽວກັນ, ວັນນະຄະດີກ່ຽວກັບ drones ກະສິກໍາແມ່ນຕ້ອງການເປັນກຸ່ມຢ່າງເປັນລະບົບ, ພິຈາລະນາການສຶກສາທີ່ມີອິດທິພົນທີ່ສຸດທີ່ສ້າງພື້ນຖານຂອງການຄົ້ນຄວ້ານີ້. ຄຸນງາມຄວາມດີໃນການວິເຄາະຍັງປະກອບມີການຊີ້ແຈງຂອງຫົວຂໍ້ການຄົ້ນຄວ້າຕົ້ນຕໍທີ່ເປັນຕົວແທນໃນວັນນະຄະດີ. ພິຈາລະນາທ່າແຮງການຫັນປ່ຽນຂອງເຕັກໂນໂລຢີ, ພວກເຮົາສະເຫນີວ່າການວິເຄາະເຄືອຂ່າຍແບບເລິກເຊິ່ງເຮັດໃຫ້ຄວາມເຂົ້າໃຈໃຫມ່ໂດຍການກໍານົດວຽກງານທີ່ມີອິດທິພົນແລະເປີດເຜີຍຫົວຂໍ້ກ່ຽວກັບທ່າແຮງຂອງ drones ສໍາລັບກະສິກໍາ.
ດັ່ງນັ້ນ, ພວກເຮົາພະຍາຍາມບັນລຸຈຸດປະສົງການຄົ້ນຄວ້າດັ່ງຕໍ່ໄປນີ້:
- ການກໍານົດສິ່ງພິມທີ່ມີອິດທິພົນທີ່ມີການປະກອບສ່ວນທີ່ໂດດເດັ່ນໃນການນໍາໃຊ້ drone ໃນຂົງເຂດກະສິກໍາ.
- ການຈັດກຸ່ມຂອງວັນນະຄະດີ, ການກໍານົດ foci ການຄົ້ນຄວ້າ, ແລະການສ້າງແຜນທີ່ຂອງການສຶກສາ 'ໂຄງສ້າງທາງປັນຍາ' ຕົ້ນຕໍໂດຍອີງໃສ່ຄວາມຄ້າຍຄືກັນ semantic ໂດຍໃຊ້ການວິເຄາະການອ້າງອິງຮ່ວມກັນ.
- ຄວາມເຂົ້າໃຈກ່ຽວກັບວິວັດທະນາການເຊື່ອມໂຍງແລະເຄືອຂ່າຍການອ້າງອິງໃນໄລຍະເວລາລະຫວ່າງສິ່ງພິມຕ່າງໆໃນພາກສະຫນາມແລະການກໍານົດທິດທາງການຄົ້ນຄວ້າໃນອະນາຄົດແລະຫົວຂໍ້ຮ້ອນ.
ສ່ວນທີ່ເຫຼືອຂອງເອກະສານແມ່ນໂຄງສ້າງດັ່ງນີ້: ພາກທີ 2 ອະທິບາຍວິທີການ ແລະ ຂັ້ນຕອນການເກັບກຳຂໍ້ມູນ; ພາກທີ 3 ໃຫ້ຜົນຂອງການວິເຄາະ; ແລະ ພາກທີ 4 ປຶກສາຫາລືການຄົ້ນພົບ ແລະ ສະຫຼຸບດ້ວຍການປະກອບສ່ວນຂອງການຄົ້ນຄວ້າ, ຜົນກະທົບ ແລະທິດທາງໃນອະນາຄົດ.
Methodology
ໃນການສຶກສາຄົ້ນຄ້ວາໃນປະຈຸບັນນີ້, ພວກເຮົາດໍາເນີນການວິເຄາະ bibliometric ເພື່ອຄົ້ນຫາຄໍາຮ້ອງສະຫມັກ drone ໃນການກະສິກໍາ. ວິທີການປະລິມານນີ້ເປີດເຜີຍໂຄງສ້າງທາງປັນຍາຂອງໂດເມນຄວາມຮູ້ (Arora & Chakraborty, 2021) ແລະສະຖານະການໃນປະຈຸບັນ, ຫົວຂໍ້ຮ້ອນ, ແລະທິດທາງການຄົ້ນຄວ້າໃນອະນາຄົດທີ່ສາມາດສືບສວນໄດ້ໂດຍການນໍາໃຊ້ວິທີການນີ້ (Kapoor et al., 2018; Mishra et al. , 2017; A. Rejeb, Rejeb, et al., 2021b; A. Rejeb et al., 2021d; MA Rejeb et al., 2020). ໂດຍທົ່ວໄປແລ້ວ, ການວິເຄາະ bibliometric ກວດສອບວັນນະຄະດີທີ່ມີຢູ່ແລ້ວເພື່ອສະຫຼຸບແລະເປີດເຜີຍຮູບແບບທີ່ເຊື່ອງໄວ້ຂອງການສື່ສານລາຍລັກອັກສອນແລະການວິວັດທະນາການຂອງລະບຽບວິໄນໂດຍອີງໃສ່ສະຖິຕິແລະວິທີການທາງຄະນິດສາດ, ແລະມັນໃຊ້ກັບຊຸດຂໍ້ມູນຂະຫນາດໃຫຍ່ (Pritchard, 1969; ຂະຫນາດນ້ອຍ, 1999; Tahai & Rigsby. , 1998). ໂດຍການນໍາໃຊ້ bibliometrics, ພວກເຮົາປາດຖະຫນາທີ່ຈະເຂົ້າໃຈດີກວ່າ paradigms ທີ່ມີຢູ່ແລ້ວແລະການຄົ້ນຄວ້າ foci ທີ່ປະກອບສ່ວນກັບໂດເມນໂດຍອີງໃສ່ຄວາມຄ້າຍຄືກັນ (Thelwall, 2008). Bibliometrics ສະຫນອງຄວາມເຂົ້າໃຈໃຫມ່ທີ່ສະຫນັບສະຫນູນໂດຍຄວາມເຂັ້ມແຂງທາງດ້ານປະລິມານຂອງຈຸດປະສົງຂອງວິທີການ (Casillas & Acedo, 2007). ນັກວິຊາການຈໍານວນຫລາຍໄດ້ດໍາເນີນການສຶກສາ bibliometric ໃນໂດເມນທີ່ກ່ຽວຂ້ອງ, ລວມທັງກະສິກໍາ, ການຮັບຮູ້ທາງໄກ, ແລະການຫັນເປັນດິຈິຕອນ (Armenta-Medina et al., 2020; Bouzembrak et al., 2019; A. Rejeb, Treiblmaier, et al., 2021; W. & Queiroz, 2021; Wang et al., 2019).
ການວິເຄາະອ້າງອີງ
ການວິເຄາະການອ້າງອີງເປີດເຜີຍໃຫ້ເຫັນຄວາມເຂົ້າໃຈຕ່າງໆໃນພາກສະຫນາມການຄົ້ນຄວ້າໄດ້ຮັບ. ກ່ອນອື່ນ ໝົດ, ມັນຊ່ວຍເປີດເຜີຍໃຫ້ນັກຂຽນແລະສິ່ງພິມທີ່ມີອິດທິພົນທີ່ສຸດທີ່ປະກອບສ່ວນເຂົ້າໃນການຄົ້ນຄວ້າແລະສ້າງຜົນກະທົບທີ່ສໍາຄັນ (Gundolf & Filser, 2013). ອັນທີສອງ, ກະແສຄວາມຮູ້ແລະການຕິດຕໍ່ສື່ສານລະຫວ່າງຜູ້ຂຽນສາມາດຖືກເປີດເຜີຍ. ສຸດທ້າຍ, ໂດຍການຕິດຕາມການເຊື່ອມໂຍງລະຫວ່າງວຽກງານທີ່ອ້າງເຖິງແລະການອ້າງອີງ, ຄົນເຮົາສາມາດຄົ້ນຫາການປ່ຽນແປງແລະວິວັດທະນາຂອງໂດເມນຄວາມຮູ້ໃນໄລຍະເວລາ (Pournader
et al., 2020). ຕົວເລກອ້າງອີງສູງຂອງສິ່ງພິມສະທ້ອນໃຫ້ເຫັນເຖິງຄວາມກ່ຽວຂ້ອງແລະການປະກອບສ່ວນຢ່າງຫຼວງຫຼາຍຕໍ່ໂດເມນການຄົ້ນຄວ້າ (Baldi, 1998; Gunolf & Filser, 2013; Marinko, 1998). ການວິເຄາະອ້າງອີງຂອງສິ່ງພິມຍັງຊ່ວຍກໍານົດວຽກງານທີ່ກ່ຽວຂ້ອງແລະຕິດຕາມຄວາມນິຍົມແລະຄວາມຄືບຫນ້າຂອງເຂົາເຈົ້າໃນໄລຍະເວລາ.
ການວິເຄາະການອ້າງອິງຮ່ວມກັນຂອງເອກະສານ
ການວິເຄາະການອ້າງອິງຮ່ວມກັນແມ່ນວິທີການທີ່ມີຄຸນຄ່າເພື່ອຄົ້ນຫາຄວາມສໍາພັນລະຫວ່າງສິ່ງພິມແລະພັນລະນາເຖິງໂຄງສ້າງທາງປັນຍາຂອງພາກສະຫນາມ (Nerur et al., 2008). ໃນຄໍາສັບຕ່າງໆອື່ນໆ, ໂດຍການກໍານົດສິ່ງພິມທີ່ຖືກອ້າງເຖິງຫຼາຍທີ່ສຸດແລະການເຊື່ອມຕໍ່ຂອງພວກເຂົາ, ວິທີການຈັດກຸ່ມສິ່ງພິມເຂົ້າໄປໃນກຸ່ມການຄົ້ນຄວ້າທີ່ແຕກຕ່າງກັນ, ໃນບັນດາສິ່ງພິມໃນກຸ່ມມີຄວາມຄິດທີ່ຄ້າຍຄືກັນເປັນປົກກະຕິ (McCain, 1990; Small, 1973). ມັນເປັນສິ່ງສໍາຄັນທີ່ຈະກ່າວເຖິງວ່າຄວາມຄ້າຍຄືກັນບໍ່ໄດ້ຫມາຍຄວາມວ່າການຄົ້ນພົບຂອງສິ່ງພິມແມ່ນ
cohesive ແລະຕົກລົງເຫັນດີກັບກັນແລະກັນ; ສິ່ງພິມຕ່າງໆຢູ່ໃນກຸ່ມດຽວກັນເນື່ອງຈາກຫົວຂໍ້ຄ້າຍຄືກັນ, ແຕ່ພວກເຂົາສາມາດມີທັດສະນະທີ່ກົງກັນຂ້າມ.
ການເກັບແລະການວິເຄາະຂໍ້ມູນ
ປະຕິບັດຕາມວິທີການທີ່ສະເຫນີໂດຍ White and Griffith (1981), ພວກເຮົາໄດ້ດໍາເນີນການຄົ້ນຫາບົດຄວາມໃນວາລະສານຢ່າງກວ້າງຂວາງເພື່ອໃຫ້ກວມເອົາໂດເມນການຄົ້ນຄວ້າທັງຫມົດຂອງການນໍາໃຊ້ drone ໃນກະສິກໍາ, ດໍາເນີນການຫ້າຂັ້ນຕອນຕໍ່ໄປນີ້:
- ຂັ້ນຕອນທໍາອິດແມ່ນການເກັບກໍາຂໍ້ມູນ. Scopus ຖືກເລືອກໃຫ້ເປັນຫນຶ່ງໃນຖານຂໍ້ມູນທີ່ສົມບູນແບບທີ່ສຸດແລະເຊື່ອຖືໄດ້ດ້ວຍຜົນໄດ້ຮັບມາດຕະຖານ. ຂໍ້ມູນ meta-data ຂອງສິ່ງພິມທີ່ກ່ຽວຂ້ອງກັບຄໍາຮ້ອງສະຫມັກ drone ທັງຫມົດໃນການກະສິກໍາໄດ້ຖືກດຶງມາ. ຫຼັງຈາກນັ້ນ, ພວກເຮົາວິເຄາະບົດຄວາມທີ່ເລືອກ, ເອົາບົດຄວາມນອກຫົວຂໍ້ອອກຈາກການວິເຄາະ.
- ພວກເຮົາໄດ້ວິເຄາະວັນນະຄະດີແລະກໍານົດຄໍາສໍາຄັນທີ່ສຸດທີ່ໃຊ້ໃນການຄົ້ນຄວ້າ.
- ການນໍາໃຊ້ການວິເຄາະການອ້າງອິງ, ພວກເຮົາໄດ້ຄົ້ນຫາການເຊື່ອມຕໍ່ລະຫວ່າງຜູ້ຂຽນແລະເອກະສານເພື່ອເປີດເຜີຍຮູບແບບການອ້າງອີງທີ່ຕິດພັນ. ພວກເຮົາຍັງໄດ້ກໍານົດຜູ້ຂຽນແລະສິ່ງພິມທີ່ມີອິດທິພົນທີ່ສຸດທີ່ມີການປະກອບສ່ວນທີ່ສໍາຄັນໃນພາກສະຫນາມຂອງ drones ກະສິກໍາ.
- ພວກເຮົາໄດ້ເຮັດການວິເຄາະການອ້າງອີງຮ່ວມກັນເພື່ອຈັດກຸ່ມສິ່ງພິມທີ່ຄ້າຍຄືກັນອອກເປັນກຸ່ມ.
- ສຸດທ້າຍ, ພວກເຮົາໄດ້ວິເຄາະການເຊື່ອມຕໍ່ແລະການເຊື່ອມໂຍງລະຫວ່າງປະເທດ, ສະຖາບັນ, ແລະວາລະສານເພື່ອພັນລະນາເຖິງເຄືອຂ່າຍການຮ່ວມມື.
ການກໍານົດຄໍາຄົ້ນຫາທີ່ເຫມາະສົມ
ພວກເຮົາໄດ້ນໍາໃຊ້ສະຕຣິງການຄົ້ນຫາດັ່ງຕໍ່ໄປນີ້ສໍາລັບການລວມຂໍ້ມູນ: (drone * OR "ຍານພາຫະນະທາງອາກາດບໍ່ມີຄົນຂັບ" OR uav * OR "ລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ” ຫຼື ທີ່ ຫຼື “ເຮືອບິນທົດລອງໄລຍະໄກ”) ແລະ (ກະເສດ ຫຼື ກະສິກຳ ຫຼື ກະສິກຳ ຫຼື ຊາວນາ). ການຄົ້ນຫາໄດ້ດໍາເນີນໃນເດືອນກັນຍາ 2021. Drones ມີຫຼາຍການອອກແບບ, ລວມທັງ UAV, UAS, ແລະເຮືອບິນທີ່ບິນຈາກໄລຍະໄກ (Sah et al., 2021). ຄໍາຄົ້ນຫາສະເພາະທີ່ກ່ຽວຂ້ອງກັບການກະສິກໍາໄດ້ຖືກລະບຸໂດຍອີງໃສ່ການສຶກສາຂອງ Abdollahi et al. (2021). ເພື່ອຄວາມກະຈ່າງແຈ້ງແລະຄວາມໂປ່ງໃສ, ການສອບຖາມທີ່ແນ່ນອນທີ່ພວກເຮົາໃຊ້ແມ່ນໃຫ້ຢູ່ໃນເອກະສານຊ້ອນທ້າຍ 1. ຫຼັງຈາກຂະບວນການທໍາຄວາມສະອາດຂໍ້ມູນ, ພວກເຮົາໄດ້ສ້າງໄຟລ໌ຂໍ້ຄວາມທີ່ຖືກໂຫລດຕໍ່ມາໃນ BibExcel, ເຄື່ອງມືທົ່ວໄປສໍາລັບການວິເຄາະການອ້າງອິງແລະ co-citation. ເຄື່ອງມືນີ້ຍັງສະຫນອງການໂຕ້ຕອບງ່າຍດາຍກັບຊອບແວອື່ນໆແລະສະຫນອງລະດັບທີ່ສໍາຄັນຂອງອິດສະລະພາບໃນການຈັດການຂໍ້ມູນແລະການວິເຄາະ. VOSviewer ເວີຊັ່ນ 1.6.16 ຖືກນໍາໃຊ້ເພື່ອສະແດງພາບການຄົ້ນພົບ ແລະສ້າງເຄືອຂ່າຍ bibliometric (Eck & Waltman, 2009). VOSviewer ສະຫນອງການເບິ່ງເຫັນພາບທີ່ເຂົ້າໃຈໄດ້ຫຼາຍປະເພດ, ໂດຍສະເພາະສໍາລັບການວິເຄາະແຜນທີ່ bibliometric (Geng et al., 2020). ນອກຈາກນັ້ນ, ມັນຊ່ວຍໃນການສະຫນອງຜົນໄດ້ຮັບທາງສາຍຕາທີ່ຊ່ວຍໃນການເຂົ້າໃຈຜົນໄດ້ຮັບທີ່ດີກວ່າ (Abdollahi et al., 2021). ການໃຊ້ສະຕຣິງຄົ້ນຫາດັ່ງທີ່ໄດ້ກ່າວໄວ້ຂ້າງເທິງ, ພວກເຮົາໄດ້ລວບລວມແລະເກັບຮັກສາສິ່ງພິມທີ່ກ່ຽວຂ້ອງທັງຫມົດ. ຜົນການຄົ້ນຫາຄັ້ງທໍາອິດໃຫ້ຜົນຜະລິດທັງຫມົດ 5,085 ເອກະສານ. ເພື່ອຮັບປະກັນຄຸນນະພາບຂອງຕົວຢ່າງທີ່ເລືອກ, ມີພຽງແຕ່ບົດຄວາມວາລະສານທີ່ທົບທວນຄືນໃນການຄົ້ນຄວ້າ, ເຮັດໃຫ້ການຍົກເວັ້ນເອກະສານປະເພດອື່ນໆ, ເຊັ່ນ: ປື້ມ, ບົດ, ການດໍາເນີນກອງປະຊຸມ, ແລະບັນທຶກບັນນາທິການ. ໃນລະຫວ່າງການກວດສອບ, ຄວາມບໍ່ກ່ຽວຂ້ອງ (ເຊັ່ນ, ເກີນຂອບເຂດຂອງວຽກງານນີ້), ຊໍ້າຊ້ອນ (ເຊັ່ນ, ຊໍ້າກັນທີ່ມາຈາກການສ້າງດັດສະນີສອງເທົ່າ), ແລະສິ່ງພິມທີ່ບໍ່ແມ່ນພາສາອັງກິດຖືກກັ່ນຕອງອອກ. ຂະບວນການນີ້ເຮັດໃຫ້ການລວມເອົາເອກະສານ 4,700 ໃນການວິເຄາະສຸດທ້າຍ.
ການຄົ້ນພົບແລະການສົນທະນາ
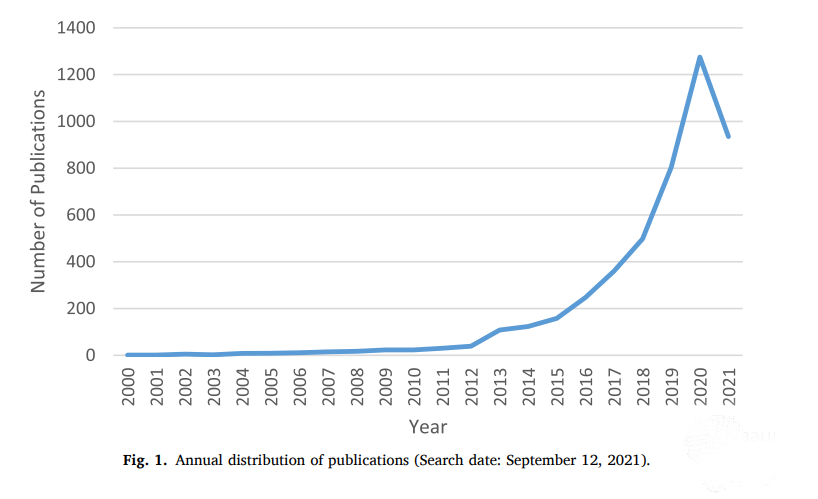
ເພື່ອເລີ່ມຕົ້ນ, ພວກເຮົາໄດ້ວິເຄາະການພັດທະນາຜົນຜະລິດຂອງສິ່ງພິມໃນວັນນະຄະດີໃນປະຈຸບັນກ່ຽວກັບ drones ກະສິກໍາ. ການແຜ່ກະຈາຍຊົ່ວຄາວຂອງການຄົ້ນຄວ້າທາງວິຊາການແມ່ນສະແດງຢູ່ໃນຮູບທີ 1. ພວກເຮົາເຫັນການເພີ່ມຂຶ້ນຢ່າງໄວວາຂອງສິ່ງພິມຈາກປີ 2011 (30 ສິ່ງພິມ) ເປັນຕົ້ນໄປ; ດັ່ງນັ້ນ, ພວກເຮົາໄດ້ຕັດສິນໃຈແບ່ງໄລຍະການວິເຄາະອອກເປັນສອງໄລຍະທີ່ແຕກຕ່າງກັນ. ພວກເຮົາອ້າງເຖິງໄລຍະເວລາລະຫວ່າງ 1990 ແລະ 2010 ເປັນຂັ້ນຕອນຂອງການກໍ່ສ້າງ, ເຊິ່ງມີປະມານເຈັດເອກະສານທີ່ຈັດພີມມາໃນແຕ່ລະປີ. ໄລຍະຫລັງປີ 2010 ໄດ້ຖືກເອີ້ນວ່າເປັນໄລຍະການຂະຫຍາຍຕົວນັບຕັ້ງແຕ່ການຄົ້ນຄວ້າກ່ຽວກັບການນໍາໃຊ້ drone ໃນການກະສິກໍາເປັນພະຍານເຖິງການຂະຫຍາຍຕົວຂອງຕົວເລກໃນໄລຍະນີ້. ຫຼັງຈາກປີ 2010, ຈໍານວນສິ່ງພິມທີ່ເພີ່ມຂຶ້ນໄດ້ຢືນຢັນເຖິງຄວາມສົນໃຈເພີ່ມຂຶ້ນຂອງນັກຄົ້ນຄວ້າ, ເຊິ່ງຍັງສະທ້ອນໃຫ້ເຫັນວ່າ drones ໄດ້ຖືກນໍາໃຊ້ກັບການຮັບຮູ້ທາງໄກແລະນໍາໃຊ້ໃນກະສິກໍາຄວາມແມ່ນຍໍາ (Deng et al., 2018; Maes & Steppe, 2019; Messina & Modica, 2020). ). ໂດຍສະເພາະ, ຈໍານວນສິ່ງພິມໄດ້ເພີ່ມຂຶ້ນຈາກ 108 ໃນປີ 2013 ເປັນ 498 ໃນປີ 2018 ແລະສູງສຸດຢູ່ທີ່ 1,275 ໃນປີ 2020. ຈໍານວນ 935 ບົດຄວາມໄດ້ຖືກຕີພິມໃນລະຫວ່າງເດືອນມັງກອນຫາກາງເດືອນກັນຍາ 2021. ຕໍ່ມາ, ພວກເຮົາເລືອກທີ່ຈະສຸມໃສ່ການວິເຄາະຂອງພວກເຮົາເພີ່ມເຕີມກ່ຽວກັບຂັ້ນຕອນການຂະຫຍາຍຕົວ. ນັບຕັ້ງແຕ່ໄລຍະເວລານີ້ສະທ້ອນໃຫ້ເຫັນ subtleties ຫລ້າສຸດແລະທີ່ສໍາຄັນຂອງ drones ກະສິກໍາ.
ການວິເຄາະຄໍາຫລັກ
ຄໍາສໍາຄັນທີ່ຜູ້ຂຽນເລືອກສໍາລັບການພິມເຜີຍແຜ່ມີຜົນກະທົບທີ່ສໍາຄັນກ່ຽວກັບວິທີທີ່ເອກະສານໄດ້ຖືກສະແດງແລະວິທີການສື່ສານພາຍໃນຊຸມຊົນວິທະຍາສາດ. ພວກເຂົາເຈົ້າກໍານົດຫົວຂໍ້ທີ່ສໍາຄັນຂອງການຄົ້ນຄວ້າແລະກໍານົດທ່າແຮງຂອງມັນທີ່ຈະຈະເລີນຮຸ່ງເຮືອງຫຼືລົ້ມເຫລວ (Day & Gastel, 1998.; Kim et al., 2016; Uddin et al., 2015). ການວິເຄາະຄໍາສໍາຄັນ, ເຄື່ອງມືເພື່ອເປີດເຜີຍແນວໂນ້ມການຄົ້ນຄວ້າຢ່າງກວ້າງຂວາງແລະທິດທາງ, ຫມາຍເຖິງການລວບລວມຄໍາສໍາຄັນຂອງສິ່ງພິມທີ່ກ່ຽວຂ້ອງທັງຫມົດໃນໂດເມນ (Dixit & Jakhar, 2021). ໃນການສຶກສາໃນປະຈຸບັນ, ພວກເຮົາໄດ້ແບ່ງຄໍາຫລັກລວມອອກເປັນສອງຊຸດ (ເຊັ່ນ: ຈົນກ່ວາ 2010 ແລະ 2011-2021) ເພື່ອຄົ້ນຫາຫົວຂໍ້ທີ່ນິຍົມຫຼາຍທີ່ສຸດ. ໂດຍການເຮັດນີ້, ພວກເຮົາສາມາດຕິດຕາມຄໍາສໍາຄັນໃນທັງສອງຊຸດແລະຮັບປະກັນວ່າພວກເຮົາເກັບກໍາຂໍ້ມູນທີ່ຈໍາເປັນທັງຫມົດ. ສໍາລັບແຕ່ລະຊຸດ, ສິບຄໍາສໍາຄັນແມ່ນນໍາສະເຫນີຢູ່ໃນຕາຕະລາງ 3. ພວກເຮົາໄດ້ກໍາຈັດຄວາມບໍ່ສອດຄ່ອງໂດຍການລວມເອົາຄໍາທີ່ມີລັກສະນະຄ້າຍຄືກັນ, ເຊັ່ນ "drone" ແລະ "drones" ຫຼື, "Internet of Things" ແລະ "IoT."
ຕາຕະລາງ 3 ສະແດງໃຫ້ເຫັນວ່າ "ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ" ແມ່ນຄໍາທີ່ໃຊ້ເລື້ອຍໆເມື່ອທຽບກັບ "drone" ແລະ "ລະບົບທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ" ໃນທັງສອງໄລຍະເວລາ. ນອກຈາກນັ້ນ, "ການຮັບຮູ້ທາງໄກ", "ການກະສິກໍາທີ່ຊັດເຈນ," ແລະ "ການກະສິກໍາ" ແມ່ນຈັດອັນດັບສູງໃນທັງສອງໄລຍະເວລາ. ໃນໄລຍະທໍາອິດ, "ການກະສິກໍາຄວາມແມ່ນຍໍາ" ຈັດອັນດັບທີຫ້າ, ແລະມັນຈັດອັນດັບທີສອງໃນໄລຍະທີສອງ, ເຊິ່ງສະແດງໃຫ້ເຫັນເຖິງວິທີການ drones ໄດ້ກາຍເປັນຄວາມສໍາຄັນເພີ່ມຂຶ້ນໃນການບັນລຸການກະສິກໍາຄວາມແມ່ນຍໍາຍ້ອນວ່າເຂົາເຈົ້າສາມາດເຮັດໃຫ້ການຕິດຕາມ,
ການກວດຫາ, ແລະການປະຕິບັດການຄາດຄະເນໄດ້ໄວຂຶ້ນ, ລາຄາຖືກກວ່າ, ແລະປະຕິບັດໄດ້ງ່າຍຂຶ້ນເມື່ອປຽບທຽບກັບລະບົບການຮັບຮູ້ທາງໄກ ແລະລະບົບພື້ນດິນອື່ນໆ. ນອກຈາກນັ້ນ, ພວກເຂົາສາມາດສີດໃສ່ປະລິມານທີ່ຊັດເຈນ (ຕົວຢ່າງ, ນ້ໍາຫຼືຢາຂ້າແມງໄມ້) ເມື່ອຕ້ອງການ (Guo et al., 2020; Inoue, 2020; Panday, Pratihast, et al., 2020).
ບັນຊີລາຍຊື່ຂອງຄໍາທີ່ໃຊ້ເລື້ອຍໆທີ່ສຸດ.
ອັນດັບ | 1990-2010 | ສະບັບຂອງ ການປະກົດຕົວ | 2011-2021 | ສະບັບຂອງ ການປະກົດຕົວ |
| 1 | ເຮືອບິນບໍ່ມີຄົນຂັບ ຍານພາຫະນະ | 28 | unmanned ຍານອາວະກາດ | 1628 |
| 2 | ຄວາມຮູ້ສຶກທາງໄກ | 7 | ຄວາມຖືກຕ້ອງ ການກະສິກໍາ | 489 |
| 3 | ການກະສິກໍາ | 4 | ຄວາມຮູ້ສຶກທາງໄກ | 399 |
| 4 | ອາກາດ | 4 | drone | 374 |
| 5 | ຄວາມຖືກຕ້ອງ ການກະສິກໍາ | 4 | unmanned ລະບົບທາງອາກາດ | 271 |
| 6 | ເຮືອບິນບໍ່ມີຄົນຂັບ | 4 | ການກະສິກໍາ | 177 |
| 7 | hyperspectral sensor | 3 | ການຮຽນຮູ້ລຶກລັບ | 151 |
| 8 | ເສັ້ນປະສາດທຽມ ເຄືອຂ່າຍ | 2 | ເຄື່ອງ ການຮຽນຮູ້ | 149 |
| 9 | ການບິນເປັນເອກະລາດ | 2 | ພືດພັນ ດັດຊະນີ | 142 |
| 10 | ກາເຟ | 2 | ອິນເຕີເນັດຂອງ ສິ່ງທີ່ | 124 |
ລັກສະນະທີ່ຫນ້າສົນໃຈອີກອັນຫນຶ່ງແມ່ນການປະກົດຕົວຂອງເຕັກໂນໂລຢີທີ່ສົມບູນ. ໃນຂັ້ນຕອນທໍາອິດ, "Hyperspectral Sensor" ແລະ "ເຄືອຂ່າຍ neural ທຽມ" (ANN) ແມ່ນຫນຶ່ງໃນສິບຄໍາສໍາຄັນ. ການຖ່າຍຮູບແບບ hyperspectral ໄດ້ປະຕິວັດການຖ່າຍຮູບແບບດັ້ງເດີມໂດຍການເກັບກຳຮູບເປັນຈຳນວນຫຼວງຫຼາຍຢູ່ໃນຄວາມຍາວຄື້ນຕ່າງໆ. ການເຮັດດັ່ງນັ້ນ, ເຊັນເຊີສາມາດເກັບກໍາຂໍ້ມູນທາງກວ້າງຂອງພື້ນທີ່ແລະ spectral ທີ່ດີກວ່າໃນເວລາດຽວກັນເມື່ອທຽບກັບຮູບພາບຫຼາຍspectral, spectroscopy, ແລະຮູບພາບ RGB (Adao ˜ et al.,
2017). ການປະກົດຕົວຂອງ "ANN" ໃນຂັ້ນຕອນທໍາອິດແລະ "ການຮຽນຮູ້ເລິກ" (DL) ແລະ "ການຮຽນຮູ້ເຄື່ອງຈັກ" (ML) ໃນອັນທີສອງຫມາຍຄວາມວ່າວຽກງານທີ່ຈັດພີມມາສ່ວນໃຫຍ່ໄດ້ສຸມໃສ່ການກວດສອບທ່າແຮງຂອງເຕັກນິກ AI ສໍາລັບ drone- ກະສິກໍາທີ່ອີງໃສ່. ເຖິງແມ່ນວ່າ drones ສາມາດບິນອັດຕະໂນມັດ, ເຂົາເຈົ້າຍັງຮຽກຮ້ອງໃຫ້ມີການມີສ່ວນຮ່ວມຂອງນັກບິນ, ຊຶ່ງຫມາຍຄວາມວ່າລະດັບຕ່ໍາຂອງຄວາມສະຫລາດອຸປະກອນ. ຢ່າງໃດກໍ່ຕາມ, ບັນຫານີ້ສາມາດແກ້ໄຂໄດ້ເນື່ອງຈາກຄວາມກ້າວຫນ້າຂອງເຕັກນິກ AI, ເຊິ່ງສາມາດສະຫນອງການຮັບຮູ້ສະຖານະການທີ່ດີກວ່າແລະການສະຫນັບສະຫນູນການຕັດສິນໃຈຂອງຕົນເອງ. ພ້ອມກັບ AI, drones ສາມາດຫຼີກລ້ຽງການປະທະກັນໃນລະຫວ່າງການນໍາທາງ, ປັບປຸງການຈັດການດິນ ແລະການປູກພືດ (Inoue, 2020), ແລະຫຼຸດຜ່ອນແຮງງານ ແລະຄວາມກົດດັນສໍາລັບມະນຸດ (BK Sharma et al., 2019).
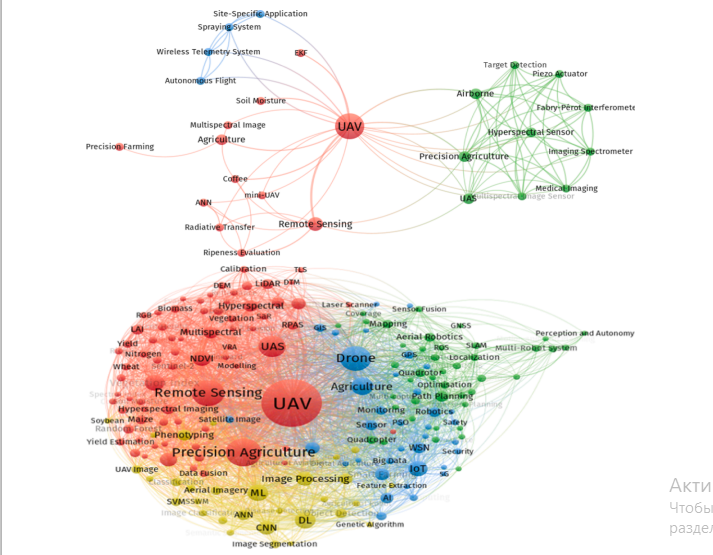
ເນື່ອງຈາກຄວາມຍືດຫຍຸ່ນແລະຄວາມສາມາດໃນການຈັດການກັບຂໍ້ມູນທີ່ບໍ່ມີເສັ້ນຈໍານວນຫລາຍ, ເຕັກນິກ AI ແມ່ນວິທີການທີ່ເຫມາະສົມໃນການວິເຄາະຂໍ້ມູນທີ່ສົ່ງໂດຍ drones ແລະລະບົບການຮັບຮູ້ທາງໄກແລະພື້ນດິນອື່ນໆສໍາລັບການຄາດຄະເນແລະການຕັດສິນໃຈ (Ali et al., 2015; Inoue, 2020). ຍິ່ງໄປກວ່ານັ້ນ, ການປະກົດຕົວຂອງ "IoT" ໃນໄລຍະທີສອງຊີ້ໃຫ້ເຫັນເຖິງບົດບາດທີ່ພົ້ນເດັ່ນຂື້ນໃນກະສິກໍາ. IoT ກໍາລັງປະຕິວັດການກະສິກໍາໂດຍການເຊື່ອມຕໍ່ກັນກັບເຕັກໂນໂລຢີອື່ນໆ, ລວມທັງ drones, ML, DL, WSNs, ແລະຂໍ້ມູນໃຫຍ່. ຫນຶ່ງໃນຜົນປະໂຫຍດທີ່ສໍາຄັນຂອງການປະຕິບັດ IoT ແມ່ນຄວາມສາມາດຂອງຕົນໃນການຜະສົມຜະສານວຽກງານຕ່າງໆ (ການເກັບຂໍ້ມູນ, ການວິເຄາະຂໍ້ມູນແລະການປຸງແຕ່ງ, ການຕັດສິນໃຈແລະການປະຕິບັດ) ໃນເວລາໃກ້ຄຽງ (Elijah et al., 2018; Feng et al. , 2019; Muangprathub et al., 2019). ນອກຈາກນັ້ນ, drones ຖືວ່າເປັນເຄື່ອງມືທີ່ມີປະສິດທິພາບສໍາລັບການຈັບຂໍ້ມູນທີ່ຈໍາເປັນສໍາລັບການຄິດໄລ່ຄວາມແຂງແຮງຂອງພືດແລະຄຸນສົມບັດຂອງພືດ (Candiago et al., 2015). Fig. 2a ແລະ 2b ສະແດງໃຫ້ເຫັນເຖິງເຄືອຂ່າຍການເກີດຂຶ້ນຮ່ວມກັນຂອງຄໍາສໍາຄັນສໍາລັບທັງສອງໄລຍະເວລາ.
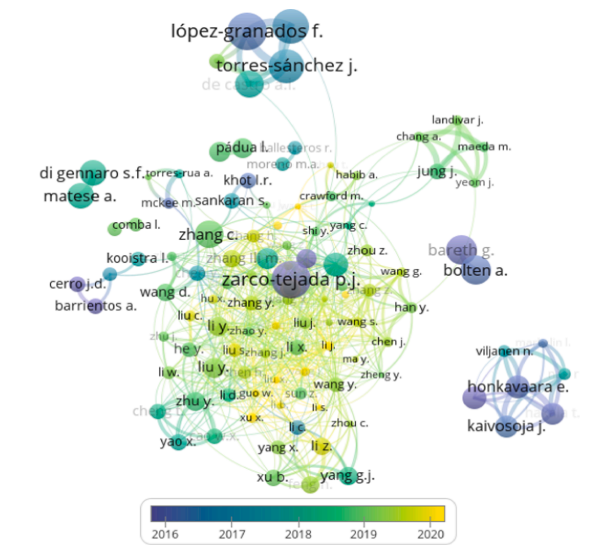
ຜູ້ຂຽນທີ່ມີອິດທິພົນ
ໃນພາກນີ້, ພວກເຮົາກໍານົດຜູ້ຂຽນທີ່ມີອິດທິພົນແລະກວດເບິ່ງວ່າເຄືອຂ່າຍການອ້າງອິງຜູ້ຂຽນສາມາດເບິ່ງເຫັນແລະຈັດລະບຽບວັນນະຄະດີໃນປະຈຸບັນໄດ້ແນວໃດ. Fig. 3 ສະແດງໃຫ້ເຫັນການຊ້ອນກັນຕາມລໍາດັບຂອງນັກຄົ້ນຄວ້າທັງຫມົດທີ່ມີຈໍານວນການອ້າງອີງສູງສຸດ. ຂະໜາດສີສະທ້ອນເຖິງການປ່ຽນແປງຂອງປີຂອງການອ້າງອີງຂອງຜູ້ຂຽນ. ພວກເຮົາກວດເບິ່ງໂຄງສ້າງການອ້າງອິງຂອງນັກຄົ້ນຄວ້າທີ່ຕີພິມການສຶກສາກ່ຽວກັບ drones ກະສິກໍາໂດຍໃຊ້ຂອບເຂດຂອງການອ້າງອິງຢ່າງຫນ້ອຍ 50 ແລະສິບສິ່ງພິມ. ອອກຈາກ
ຜູ້ຂຽນ 12,891 ຄົນ, ມີພຽງແຕ່ 115 ຄົນພົບເງື່ອນໄຂນີ້. ຕາຕະລາງ 4 ລາຍຊື່ນັກຂຽນທີ່ມີອິດທິພົນສູງສຸດ 1,963 ຄົນ, ຈັດຮຽງຕາມຈໍານວນການອ້າງອີງສູງສຸດ. Lopez- Granados F. ນໍາພາບັນຊີລາຍຊື່ດ້ວຍ 1,909 ອ້າງອີງ, ຕິດຕາມມາດ້ວຍ Zarco-Tejada PJ ທີ່ມີ XNUMX ອ້າງອີງ.
ລາຍຊື່ຜູ້ຂຽນທີ່ອ້າງອີງຫຼາຍທີ່ສຸດ.
| ຈັດລຽງລໍາດັບ | ຜູ້ຂຽນ | Citations |
| 1 | Lopez-Granados ´ F. | 1,963 |
| 2 | Zarco-Tejada PJ | 1,909 |
| 3 | Pena ˜ JM | 1,644 |
| 4 | ຕໍເຣສ-ສ Anchez J. | 1,576 |
| 5 | ເຟີເຣສ ອີ | 1,339 |
| 6 | Remondino F | 1,235 |
| 7 | Bolten A | 1,160 |
| 8 | Bareth G | 1,155 |
| 9 | Berni JA | 1,132 |
| 10 | de Castro AI | 1,036 |
ໃນເວລາທີ່ມັນມາກັບສິ່ງພິມສ່ວນບຸກຄົນ, ບົດຄວາມ Zhang and Kovacs (2012) ໄດ້ເປັນການສຶກສາອ້າງອີງຫຼາຍທີ່ສຸດຈັດພີມມາໃນ Precision Agriculture. ໃນທີ່ນີ້, ຜູ້ຂຽນໄດ້ທົບທວນຄືນຄໍາຮ້ອງສະຫມັກຂອງ UAS ໃນການກະສິກໍາຄວາມແມ່ນຍໍາ. ການຄົ້ນພົບຂອງການຄົ້ນຄວ້າຂອງເຂົາເຈົ້າຊີ້ໃຫ້ເຫັນວ່າມີຄວາມຕ້ອງການທີ່ຈະກ້າວຫນ້າໃນການອອກແບບເວທີ, ການຜະລິດ, ມາດຕະຖານຂອງ Georeferencing ຮູບພາບ, ແລະຂະບວນການດຶງຂໍ້ມູນເພື່ອໃຫ້ຊາວກະສິກອນມີຜະລິດຕະພັນສຸດທ້າຍທີ່ເຊື່ອຖືໄດ້. ນອກຈາກນັ້ນ, ເຂົາເຈົ້າແນະນຳໃຫ້ຊາວກະສິກອນມີສ່ວນຮ່ວມຢ່າງເຂັ້ມແຂງ, ໂດຍສະເພາະແມ່ນການວາງແຜນພາກສະໜາມ, ການຈັບພາບ, ການຕີຄວາມໝາຍ ແລະ ການວິເຄາະຂໍ້ມູນ. ສິ່ງສໍາຄັນ, ການສຶກສານີ້ແມ່ນເປັນຄັ້ງທໍາອິດທີ່ສະແດງໃຫ້ເຫັນຄວາມສໍາຄັນຂອງ UAV ໃນແຜນທີ່ພາກສະຫນາມ, ການສ້າງແຜນທີ່ທີ່ເຂັ້ມແຂງ, ການວັດແທກເນື້ອໃນສານເຄມີ, ການຕິດຕາມຄວາມກົດດັນຂອງພືດແລະການປະເມີນຜົນກະທົບຂອງຝຸ່ນໃນການເຕີບໂຕຂອງພືດ. ສິ່ງທ້າທາຍທີ່ກ່ຽວຂ້ອງກັບເຕັກໂນໂລຢີຍັງປະກອບມີຄ່າໃຊ້ຈ່າຍທີ່ຫ້າມ, ຄວາມສາມາດຂອງເຊັນເຊີ, ຄວາມຫມັ້ນຄົງຂອງເວທີແລະຄວາມຫນ້າເຊື່ອຖື, ການຂາດມາດຕະຖານ, ແລະຂັ້ນຕອນທີ່ສອດຄ່ອງໃນການວິເຄາະຂໍ້ມູນຈໍານວນຫລາຍ.
ການວິເຄາະອ້າງອີງ
ການວິເຄາະການອ້າງອິງເປັນຕົວແທນຂອງການສຶກສາອິດທິພົນຂອງບົດຄວາມ, ແມ້ແຕ່ມັກຈະເປັນກະແສ (ຕົວຢ່າງ, ຄວາມລໍາອຽງການອ້າງອິງ, ການອ້າງອິງຕົນເອງ) ຖືກພິຈາລະນາເປັນຫນຶ່ງໃນເຄື່ອງມືມາດຕະຖານສໍາລັບການປະເມີນຜົນຜົນກະທົບ (Osareh, 1996; A. Rejeb et al., 2022; Sarli et al., 2010). ການອ້າງອິງຍັງສະທ້ອນໃຫ້ເຫັນເຖິງຄວາມສໍາຄັນ ແລະຄວາມສໍາຄັນຂອງການປະກອບສ່ວນຂອງເອກະສານຕໍ່ກັບວັນນະຄະດີໃນຫົວຂໍ້ສະເພາະ (R. Sharma et al., 2022). ພວກເຮົາໄດ້ເຮັດການວິເຄາະອ້າງອີງເພື່ອກໍານົດການສຶກສາທີ່ມີອິດທິພົນທີ່ສຸດກ່ຽວກັບ drones ກະສິກໍາແລະສະຫຼຸບເນື້ອໃນ. ຕາຕະລາງ 5 ສະເໜີລາຍຊື່ 1990 ເອກະສານທີ່ມີອິດທິພົນທີ່ສຸດສຳລັບໄລຍະ 2010-2011 ແລະ 2021-2009. ບົດຄວາມໂດຍ Berni et al. (2010)b ແລະ Austin (1990) ໄດ້ຮັບການອ້າງອີງຫຼາຍທີ່ສຸດໃນລະຫວ່າງປີ 2010 ແລະ 831, ດ້ວຍ 498 ແລະ 2009 ການອ້າງອີງ, ຕາມລໍາດັບ. Berni et al. (2009) b ໄດ້ສະແດງໃຫ້ເຫັນເຖິງທ່າແຮງໃນການພັດທະນາຜະລິດຕະພັນການຮັບຮູ້ໄລຍະໄກໃນປະລິມານຜ່ານ UAV ທີ່ໃຊ້ເຮລິຄອບເຕີທີ່ຕິດຕັ້ງດ້ວຍເຊັນເຊີການຖ່າຍຮູບດ້ວຍຄວາມຮ້ອນ ແລະ ວົງແຄບແຄບ. ເມື່ອປຽບທຽບກັບເຊັນເຊີທາງອາກາດທີ່ມີມະນຸດແບບດັ້ງເດີມ, ລະບົບ UAV ທີ່ມີລາຄາຖືກສໍາລັບການກະສິກໍາແມ່ນສາມາດບັນລຸການຄາດຄະເນທີ່ສົມທຽບຂອງຕົວກໍານົດການທາງຊີວະພາບຂອງພືດ, ຖ້າບໍ່ດີ. ຄ່າໃຊ້ຈ່າຍທີ່ເຫມາະສົມແລະຄວາມຍືດຫຍຸ່ນໃນການດໍາເນີນງານ, ຄຽງຄູ່ກັບການແກ້ໄຂທີ່ມີຄວາມລະອຽດສູງ, ພື້ນທີ່, ແລະຊົ່ວຄາວທີ່ມີຢູ່ໃນເວລາຫັນຫນ້າໄວ, ເຮັດໃຫ້ UAVs ເຫມາະສໍາລັບຫຼາຍໆຄໍາຮ້ອງສະຫມັກທີ່ຕ້ອງການການຄຸ້ມຄອງເວລາທີ່ສໍາຄັນ, ລວມທັງການກໍານົດເວລາຊົນລະປະທານ, ແລະການກະສິກໍາທີ່ຊັດເຈນ. ເອກະສານຈາກ Berni et al. (2010) b ໄດ້ຖືກອ້າງເຖິງສູງເພາະວ່າມັນໄດ້ປະສົມປະສານຢ່າງມີປະສິດທິພາບຂອງເວທີ rotary-wing ທີ່ບໍ່ມີຄົນຂັບແລະເຊັນເຊີດິຈິຕອນແລະຄວາມຮ້ອນກັບກົນໄກການປັບທຽບທີ່ຈໍາເປັນສໍາລັບຄໍາຮ້ອງສະຫມັກກະສິກໍາ. ສິ່ງພິມທີ່ອ້າງອີງຫຼາຍທີ່ສຸດອັນດັບສອງແມ່ນຫນັງສືທີ່ຂຽນໂດຍ Austin (XNUMX), ຜູ້ທີ່ໄດ້ສົນທະນາກ່ຽວກັບ UAVs ຈາກການອອກແບບ, ການພັດທະນາ, ແລະທັດສະນະຂອງການນໍາໃຊ້. ໃນຂົງເຂດກະສິກໍາ, UAVs ສະຫນັບສະຫນູນການຕິດຕາມການປູກພືດໂດຍການກວດພົບພະຍາດໂດຍໄວໂດຍຜ່ານການປ່ຽນສີຂອງພືດ, ອໍານວຍຄວາມສະດວກໃນການຫວ່ານແລະສີດພົ່ນ, ແລະຕິດຕາມແລະຂັບລົດຝູງສັດ.
ການສຶກສາຂອງ Sullivan et al. (2007), Lumme et al. (2008), ແລະ Gokto ¨ ǧan et al. (2010) ສໍາເລັດບັນຊີລາຍຊື່ຂອງສິບຫ້າບົດຄວາມທີ່ອ້າງອີງຫຼາຍທີ່ສຸດ. ບົດຄວາມເຫຼົ່ານີ້ສະແດງໃຫ້ເຫັນເຖິງການພັດທະນາຂອງລະບົບ UAV ເພື່ອສະຫນັບສະຫນູນກະສິກໍາ. ເຂົາເຈົ້າສະເໜີໃຫ້ແກ້ໄຂບັນຫາຕ່າງໆ, ເຊັ່ນ: ການຕິດຕາມ ແລະ ການສະແກນຜົນລະປູກ, ການເຝົ້າລະວັງ ແລະ ການຈັດການວັດສະພືດ, ແລະ ການສະໜັບສະໜູນການຕັດສິນໃຈ. ພວກເຂົາເຈົ້າຍັງໄດ້ແນະນໍາແລະປຶກສາຫາລືຄວາມສາມາດຂອງ UAV ເພື່ອເພີ່ມປະສິດຕິພາບການເກັບຕົວຢ່າງແລະການຊ່ວຍເຫຼືອຊາວກະສິກອນໃນການວາງແຜນທີ່ຖືກຕ້ອງແລະປະສິດທິຜົນ.
ຍຸດທະສາດການປູກພືດ. ສອງເອກະສານໄດ້ຖືກຂຽນໂດຍ Berni (Berni et al., 2009b; Berni et al., 2009a), ເນັ້ນຫນັກເຖິງຜົນກະທົບທີ່ສໍາຄັນຂອງລາວຕໍ່ການຄົ້ນຄວ້າທີ່ກ່ຽວຂ້ອງກັບ drone ກະສິກໍາ. ເອກະສານຈາກ Zarco-Tejada et al. (2014) ໄດ້ຢູ່ໃນບັນດາການສຶກສາບຸກເບີກເພື່ອສະແດງໃຫ້ເຫັນເຖິງຄວາມຕ້ອງການທີ່ຈະນໍາໃຊ້ຮູບພາບ UAV ລາຄາຖືກໃນປະລິມານຄວາມສູງຂອງຕົ້ນໄມ້.
ລາຍຊື່ສິ່ງພິມທີ່ອ້າງອີງຫຼາຍທີ່ສຸດ.
| ອັນດັບ | ຈາກ 1990 ເຖິງ 2010 | ຈາກ 2011 ເຖິງ 2021 | ||
| ເອກະສານ | ການອ້າງອິງ | ເອກະສານ | ການອ້າງອິງ | |
| 1 | (Berni et al., 2009b) | 831 | (C. Zhang & Kovacs, 2012) | 967 |
| 2 | (ອອສຕິນ, 2010) | 498 | (Nex & Remondino, 2014) | 893 |
| 3 | (ລ່າ et al., 2010) | 331 | (Floreano & Wood, 2015) | 552 |
| 4 | (SR Herwitz et al., 2004) | 285 | (Hossein Motlagh et al., 2016) | 391 |
| 5 | (CCD Lelong et al., 2008) | 272 | (Shakhatreh et al., 2019) | 383 |
| 6 | (Berni et al., 2009b) | 250 | (ມາ et al., 2017) | 373 |
| 7 | (Grenzdorfer ¨ et al., 2008) | 198 | (Bendig et al., 2014) | 360 |
| 8 | (Hrabar et al., 2005) | 175 | (Zarco-Tejada et al., 2014) | 347 |
| 9 | (Y. Huang et al., 2009) | 129 | (Ad˜ ao et al., 2017) | 335 |
| 10 | (Schmale III et al., 2008) | 119 | (Honkavaara et al., 2013a) | 331 |
| 11 | (Abd-Elrahman et al., 2005) | 79 | (Candiago et al., 2015) | 327 |
| 12 | (Techy et al., 2010) | 69 | (Xiang & Tian, 2011) | 307 |
| 13 | (Sullivan et al., 2007) | 51 | (Matese et al., 2015) | 303 |
| 14 | (Lumme et al., 2008) | 42 | (Gago et al., 2015) | 275 |
| 15 | (Gokto ¨ ǧan et al., 2010) | 40 | (Aasen et al., 2015a) | 269 |
ໃນໄລຍະທີສອງ (2011-2021), ການຄົ້ນຄວ້າໂດຍ Zhang and Kovacs (2012) ແລະ Nex and Remondino (2014) ເຮັດໃຫ້ມີການພິມເຜີຍແຜ່ທີ່ອ້າງອີງເລື້ອຍໆທີ່ສຸດ. Zhang and Kovacs (2012) ໂຕ້ຖຽງວ່າການກະເສດທີ່ຊັດເຈນສາມາດໄດ້ຮັບຜົນປະໂຫຍດຈາກການປະຕິບັດເຕັກນິກແລະເຊັນເຊີ geospatial, ເຊັ່ນ: ລະບົບຂໍ້ມູນພູມສາດ, GPS, ແລະການຮັບຮູ້ຫ່າງໄກສອກຫຼີກ, ເພື່ອເກັບກໍາການປ່ຽນແປງໃນພາກສະຫນາມແລະຈັດການກັບພວກມັນໂດຍການໃຊ້ກົນລະຍຸດທາງເລືອກ. ໃນຖານະທີ່ເປັນຕົວປ່ຽນແປງເກມໃນການກະເສດທີ່ມີຄວາມແມ່ນຍໍາ, ການຮັບຮອງເອົາ drones ໄດ້ບອກເຖິງຍຸກໃຫມ່ໃນຄວາມຮູ້ສຶກຫ່າງໄກສອກຫຼີກ, ເຮັດໃຫ້ການສັງເກດການທາງອາກາດງ່າຍຂຶ້ນ, ເກັບກໍາຂໍ້ມູນການຂະຫຍາຍຕົວຂອງພືດ, ສະພາບດິນ, ແລະພື້ນທີ່ສີດພົ່ນ. ການທົບທວນຄືນຂອງ Zhang and Kovacs (2012) ແມ່ນ seminal ເນື່ອງຈາກວ່າມັນສະຫນອງຄວາມເຂົ້າໃຈກ່ຽວກັບ UAVs ໂດຍການເປີດເຜີຍການນໍາໃຊ້ທີ່ມີຢູ່ແລ້ວແລະຄວາມທ້າທາຍຂອງອຸປະກອນເຫຼົ່ານີ້ໃນການຕິດຕາມສິ່ງແວດລ້ອມແລະການກະສິກໍາຄວາມແມ່ນຍໍາ, ເຊັ່ນ: ຂໍ້ຈໍາກັດເວທີແລະກ້ອງຖ່າຍຮູບ, ສິ່ງທ້າທາຍການປະມວນຜົນຂໍ້ມູນ, ການມີສ່ວນຮ່ວມຂອງຊາວກະສິກອນ, ແລະກົດລະບຽບການບິນ. . ທີ່ສອງ
ການສຶກສາອ້າງອີງຫຼາຍທີ່ສຸດຈາກ Nex ແລະ Remondino (2014) ໄດ້ທົບທວນຄືນສະພາບຂອງສິລະປະຂອງ UAVs ສໍາລັບການຈັບ, ການປຸງແຕ່ງ, ແລະການວິເຄາະຮູບພາບແຜ່ນດິນໂລກ.
ວຽກງານຂອງພວກເຂົາຍັງໄດ້ນໍາສະເຫນີພາບລວມຂອງຫຼາຍໆແພລະຕະຟອມ UAV, ຄໍາຮ້ອງສະຫມັກ, ແລະກໍລະນີການນໍາໃຊ້, ສະແດງໃຫ້ເຫັນຄວາມກ້າວຫນ້າໃຫມ່ທີ່ສຸດໃນການປຸງແຕ່ງຮູບພາບ UAV. ໃນການກະສິກໍາ, ຊາວກະສິກອນສາມາດນໍາໃຊ້ UAVs ເພື່ອຕັດສິນໃຈທີ່ມີປະສິດທິພາບເພື່ອບັນລຸຄ່າໃຊ້ຈ່າຍແລະເວລາປະຫຍັດ, ໄດ້ຮັບບັນທຶກຄວາມເສຍຫາຍຢ່າງໄວວາແລະຊັດເຈນ, ແລະຄາດຄະເນບັນຫາທີ່ເປັນໄປໄດ້. ໃນທາງກົງກັນຂ້າມກັບເວທີການບິນແບບດັ້ງເດີມ, UAVs ສາມາດຕັດຄ່າໃຊ້ຈ່າຍໃນການດໍາເນີນງານແລະຫຼຸດຜ່ອນອັນຕະລາຍຂອງການເຂົ້າເຖິງໃນສະຖານທີ່ທີ່ຫຍຸ້ງຍາກໃນຂະນະທີ່ຍັງຮັກສາທ່າແຮງຄວາມຊັດເຈນສູງ. ເອກະສານຂອງພວກເຂົາສະຫຼຸບຂໍ້ໄດ້ປຽບຕ່າງໆຂອງ UAVs, ໂດຍສະເພາະໃນແງ່ຂອງຄວາມຖືກຕ້ອງແລະຄວາມລະອຽດ.
ໃນບັນດາສິ່ງພິມທີ່ຍັງເຫຼືອ 2011 ສະບັບທີ່ອ້າງເຖິງຫຼາຍທີ່ສຸດໃນລະຫວ່າງປີ 2021 ແລະ 2014, ພວກເຮົາສັງເກດເຫັນຄວາມເຂັ້ມຂຸ້ນຂອງການຄົ້ນຄວ້າທີ່ເຊື່ອມຕໍ່ກັບແອັບພລິເຄຊັນ drone ໃນພາລະກິດການຖ່າຍຮູບ (Bendig et al., 2017; Ma et al., 2014; Zarco-Tejada et al., 2015) , ການກະສິກໍາຄວາມແມ່ນຍໍາ (Candiago et al., 2013; Honkavaara et al., 2015a), ຄວາມແມ່ນຍໍາ viticulture (Matese et al., 2015), ການປະເມີນຄວາມກົດດັນນ້ໍາ (Gago et al., 2015), ແລະການຕິດຕາມພືດພັນ (Aasen et al. , XNUMXa). ໃນຊຸມປີຕົ້ນ, ນັກຄົ້ນຄວ້າໄດ້ສຸມໃສ່
ເພີ່ມເຕີມກ່ຽວກັບການພັດທະນາລະບົບທີ່ມີລາຄາຖືກຕ່ໍາ, ນ້ໍາຫນັກເບົາ, ແລະຊັດເຈນຂອງ UAV ສໍາລັບການກະສິກໍາ; ການຄົ້ນຄວ້າທີ່ຜ່ານມາໄດ້ສຸມໃສ່ເພີ່ມເຕີມກ່ຽວກັບການທົບທວນຄືນຄໍາຮ້ອງສະຫມັກ UAV ສໍາລັບກະສິກໍາແລະການສໍາຫຼວດພາກສະຫນາມ. ສະຫລຸບລວມແລ້ວ, ການວິເຄາະນີ້ສະແດງໃຫ້ເຫັນວ່າສິ່ງພິມທີ່ມີອິດທິພົນສ່ວນໃຫຍ່ໄດ້ສະຫນອງການທົບທວນຄືນຂອງການສຶກສາກ່ອນຫນ້າເພື່ອປະເມີນສະຖານະການວິທະຍາສາດແລະເຕັກໂນໂລຢີໃນປະຈຸບັນຂອງ UAVs ແລະພັດທະນາລະບົບ UAV ເພື່ອສະຫນັບສະຫນູນການກະສິກໍາທີ່ຊັດເຈນ. ຫນ້າສົນໃຈ, ພວກເຮົາບໍ່ໄດ້ພົບເຫັນການສຶກສາທີ່ເຮັດວຽກ empirical
ວິທີການຫຼືການສຶກສາກໍລະນີທີ່ອະທິບາຍ, ເຊິ່ງປະກອບເປັນຊ່ອງຫວ່າງຄວາມຮູ້ທີ່ສໍາຄັນແລະຮຽກຮ້ອງໃຫ້ມີການຄົ້ນຄວ້າເພີ່ມເຕີມກ່ຽວກັບຫົວຂໍ້ນີ້.
ການວິເຄາະການອ້າງອີງຮ່ວມກັນ
ອີງຕາມGmür (2006), ການວິເຄາະການອ້າງອິງຮ່ວມກັນກໍານົດສິ່ງພິມທີ່ຄ້າຍຄືກັນແລະຈັດກຸ່ມພວກມັນ. ການກວດສອບຢ່າງລະມັດລະວັງຂອງກຸ່ມສາມາດເປີດເຜີຍການຄົ້ນຄວ້າທົ່ວໄປໃນບັນດາສິ່ງພິມຕ່າງໆ. ພວກເຮົາສືບສວນການອ້າງອິງຮ່ວມກັນຂອງວັນນະຄະດີກ່ຽວກັບ drones ກະສິກໍາເພື່ອສະແດງໃຫ້ເຫັນສາຂາວິຊາທີ່ກ່ຽວຂ້ອງແລະກວດພົບຮູບແບບທາງປັນຍາຂອງສິ່ງພິມ. ໃນເລື່ອງນີ້, Small (1973) ແນະນໍາການນໍາໃຊ້ການວິເຄາະ cocitation ເພື່ອສຶກສາການຄົ້ນຄວ້າທີ່ມີອິດທິພົນທີ່ສຸດແລະ seminal.
ພາຍໃນລະບຽບວິໄນ. ເພື່ອຈໍາກັດການກໍານົດໄວ້ໃນບົດຄວາມທີ່ເວົ້າຫຼາຍທີ່ສຸດ (Goyal & Kumar, 2021), ພວກເຮົາກໍານົດຂອບເຂດການອ້າງອິງຮ່ວມກັນຂອງ 25, ຊຶ່ງຫມາຍຄວາມວ່າສອງບົດຄວາມຕ້ອງໄດ້ຮັບການອ້າງອີງຮ່ວມກັນໃນລາຍການອ້າງອີງຂອງ 25 ຫຼືຫຼາຍກວ່ານັ້ນສິ່ງພິມທີ່ແຕກຕ່າງກັນ. ການຈັດກຸ່ມຍັງດຳເນີນດ້ວຍຂະໜາດຂອງກຸ່ມນ້ອຍສຸດ 1 ແລະ ໂດຍບໍ່ມີວິທີໃດນຶ່ງສຳລັບການລວມກຸ່ມນ້ອຍໆກັບກຸ່ມໃຫຍ່ກວ່າ. ດັ່ງນັ້ນ, ຫົກກຸ່ມໄດ້ຖືກສ້າງຂື້ນໂດຍອີງໃສ່ຄວາມຄ້າຍຄືກັນຂອງການສຶກສາແລະໂຄງສ້າງທາງປັນຍາຂອງພວກເຂົາ. ຕາຕະລາງ 6 ສະແດງໃຫ້ເຫັນການແຈກຢາຍສິ່ງພິມໃນແຕ່ລະກຸ່ມ.
ກຸ່ມທີ 1: ກຸ່ມນີ້ປະກອບມີເອກະສານ 2018 ສະບັບທີ່ພິມເຜີຍແຜ່ ຫຼັງຈາກສິ່ງພິມຕ່າງໆໃນກຸ່ມນີ້ ປຶກສາຫາລືກ່ຽວກັບບົດບາດຂອງ drones ໃນການສະໜັບສະໜູນການຕິດຕາມສິ່ງແວດລ້ອມ, ການຄຸ້ມຄອງການປູກພືດ ແລະ ການຄຸ້ມຄອງວັດສະພືດ. ຕົວຢ່າງ, Manfreda et al. (XNUMX) ສະເໜີພາບລວມຂອງການຄົ້ນຄວ້າ ແລະ ການຈັດຕັ້ງປະຕິບັດ UAV ໃນປະຈຸບັນ ໃນການຕິດຕາມລະບົບນິເວດກະສິກຳທຳມະຊາດ ແລະ ໂຕ້ແຍ້ງວ່າ ເທັກໂນໂລຍີດັ່ງກ່າວມີທ່າແຮງອັນໃຫຍ່ຫຼວງເພື່ອເສີມຂະຫຍາຍການຕິດຕາມ ແລະ ຫຼຸດຜ່ອນສິ່ງແວດລ້ອມຢ່າງແຮງ.
ຊ່ອງຫວ່າງທີ່ມີຢູ່ແລ້ວລະຫວ່າງການສັງເກດການພາກສະຫນາມແລະການຮັບຮູ້ທາງອາກາດທໍາມະດາແລະການຮັບຮູ້ທາງໄກຈາກອາວະກາດ. ນີ້ສາມາດເຮັດໄດ້ໂດຍການສະຫນອງຄວາມສາມາດໃຫມ່ສໍາລັບການປັບປຸງການດຶງຂໍ້ມູນຊົ່ວຄາວແລະຄວາມເຂົ້າໃຈທາງພື້ນທີ່ເຂົ້າໄປໃນພື້ນທີ່ຂະຫນາດໃຫຍ່ໃນວິທີທີ່ສາມາດຊື້ໄດ້. UAVs ສາມາດຮັບຮູ້ສະພາບແວດລ້ອມຢ່າງຕໍ່ເນື່ອງແລະສົ່ງຂໍ້ມູນຜົນໄດ້ຮັບໄປຫາຫນ່ວຍງານອັດສະລິຍະ, ເປັນສູນກາງ / ການກະຈາຍຕົວທີ່ຄວບຄຸມເຊັນເຊີເພື່ອກໍານົດບັນຫາໃນທີ່ສຸດ, ເຊັ່ນການຂາດພະຍາດຫຼືການກວດພົບນ້ໍາ (Padua ´ et al., 2017). Adao ˜ et al. (2017) ຍອມຮັບວ່າ UAVs ແມ່ນເຫມາະສົມສໍາລັບການປະເມີນເງື່ອນໄຂຂອງພືດໂດຍການເກັບເອົາຂໍ້ມູນດິບຈໍານວນຫຼວງຫຼາຍທີ່ກ່ຽວຂ້ອງກັບສະຖານະພາບນ້ໍາ, ການຄາດຄະເນຊີວະມວນ, ແລະການປະເມີນຄວາມເຂັ້ມແຂງ. ເຊັນເຊີ UAV-mounted ຍັງສາມາດຖືກນໍາໄປໃຊ້ໃນທັນທີໃນສະພາບແວດລ້ອມທີ່ເຫມາະສົມເພື່ອໃຫ້ສາມາດບັນທຶກຂໍ້ມູນການຮັບຮູ້ທາງໄກໄດ້ທັນເວລາ (Von Bueren et al., 2015). ໂດຍວິທີການຂອງ UAVs, ຊາວກະສິກອນສາມາດປະຕິບັດກິດຈະກໍາການປູກຝັງພາຍໃນບ້ານໂດຍການວັດແທກຈາກການປະຕິບັດຕົວຈິງໃນພື້ນທີ່ສາມມິຕິລະດັບຂອງສະພາບແວດລ້ອມກະສິກໍາພາຍໃນ (ຕົວຢ່າງ, ເຮືອນແກ້ວ), ດັ່ງນັ້ນການຮັບປະກັນການຄວບຄຸມດິນຟ້າອາກາດໃນທ້ອງຖິ່ນແລະການຕິດຕາມພືດ (Roldan 'et al. ., 2015). ໃນແງ່ຂອງຄວາມຊັດເຈນ
ການຕັດສິນໃຈດ້ານການກະເສດ, ການຄຸ້ມຄອງການປູກພືດຈໍາເປັນຕ້ອງມີຂໍ້ມູນການປູກພືດທີ່ຖືກຕ້ອງ, ເຊື່ອຖືໄດ້ໂດຍມີການແກ້ໄຂທາງດ້ານຊົ່ວຄາວ ແລະພື້ນທີ່ທີ່ເຫມາະສົມ (Gebbers & Adamchuk, 2010; Gevaert et al., 2015; Maes & Steppe, 2019). ສໍາລັບເຫດຜົນນີ້, Agüera Vega et al. (2015) ໄດ້ໃຊ້ລະບົບເຊັນເຊີຫຼາຍສະເປກທີ່ຕິດ UAV ເພື່ອຮັບຮູບພາບຂອງການປູກດອກຕາເວັນໃນຊ່ວງລະດູປູກ. ເຊັ່ນດຽວກັນ, Huang et al. (2009) ສັງເກດວ່າການຮັບຮູ້ຫ່າງໄກສອກຫຼີກໂດຍອີງໃສ່ UAVs ສາມາດສ້າງຄວາມສະດວກໃນການວັດແທກຜົນລະປູກແລະດິນຈາກຂໍ້ມູນ spectral ທີ່ເກັບກໍາ. Verger et al. (2014) ໄດ້ພັດທະນາ ແລະ ທົດສອບເຕັກນິກການປະເມີນດັດຊະນີພື້ນທີ່ສີຂຽວ (GAI) ຈາກການວັດແທກການສະທ້ອນຂອງ UAV ໃນການນຳໃຊ້ການກະເສດທີ່ມີຄວາມແມ່ນຍໍາ, ໂດຍເນັ້ນໃສ່ພືດສາລີ ແລະ ພືດ rapeseed. ດັ່ງນັ້ນ, drones ສະຫນອງຄວາມເປັນໄປໄດ້ໃຫມ່ສໍາລັບການດຶງຂໍ້ມູນລັດການປູກພືດທີ່ມີການທົບທວນຄືນເລື້ອຍໆແລະຄວາມລະອຽດທາງກວ້າງຂອງພື້ນທີ່ສູງ (Dong et al., 2019; Garzonio et al., 2017; H. Zheng et al., 2016).
ການຈັດກຸ່ມຂອງສິ່ງພິມທີ່ມີອິດທິພົນກ່ຽວກັບ drones ກະສິກໍາ.
| ກຸ່ມບ້ານ | ຫົວຂໍ້ກວ້າງ | ເອກະສານ |
| 1 | ການຕິດຕາມສິ່ງແວດລ້ອມ, ການປູກພືດ ການຄຸ້ມຄອງ, ການຄຸ້ມຄອງວັດສະພືດ | (Ad˜ ao et al., 2017; ອາເກຣາ ເວກາ et al., 2015; de Castro et al., 2018; Gomez-Cand ´on´ et al., 2014; YB Huang et al., 2013; Khanal et al., ປີ 2017; Lopez-Granados, ´ 2011; Manfreda et al., 2018; ປ adua et al., ປີ 2017; Pena ˜ et al., 2013; P'erez-Ortiz et al., 2015; Rasmussen et al., 2013, ປີ 2016; ຕໍເຣສ-ສ anchez et al., 2014; ຕໍເຣສ-ຊານເຊສ, ໂລເປຊ-ແກຣານາໂດສ, ' ແລະ Pena, ˜ 2015; Verger et al., 2014; ວອນ Bueren et al., 2015; C. Zhang & Kovacs, 2012) |
| 2 | phenotyping ໄລຍະໄກ, ຜົນຜະລິດ ການຄາດຄະເນ, ຮູບແບບການປູກພືດ, ການນັບຂອງພືດ | (Bendig et al., 2013, 2014; Geipel et al., 2014; Gnadinger ¨ & Schmidhalter, 2017; ແຮກສູງທາລາບ et al., 2016; Holman et al., 2016; ຈິນ et al., 2017; W. Li et al., 2016; Maimaitijiang et al., 2017; ຊານຄາຣານ et al., 2015; Schirrmann et al., 2016; Shi et al., 2016; Yue et al., 2017; X. Zhou et al., 2017) |
| 3 | ຮູບພາບຄວາມຮ້ອນສໍາລັບນ້ໍາ, ການຖ່າຍຮູບ multispectral | (Baluja et al., 2012; Berni et al., 2009b; Berni et al., 2009a ; ແຄນດີອາໂກ et al., 2015; Gago et al., 2015; Gonzalez-Dugo et al., 2013, 2014; Grenzdorfer ¨ et al., 2008; ຄາລິກ et al., 2019; Matese et al., 2015; Ribeiro-Gomes et al., 2017; Santesteban et al., 2017; Uto et al., 2013) |
| 4 | ການຖ່າຍຮູບ hypersectral, spectral imaging | (Aasen et al., 2015a; Bareth et al., ປີ 2015; Hakala et al., 2013; Honkavaara et al., 2013a; Lucieer et al., 2014; Saari et al., 2011; Suomalainen et al., 2014) |
| 5 | ຄໍາຮ້ອງສະຫມັກ 3D-Mapping | (Jim'enez-Brenes et al., 2017; Nex & Remondino, 2014; Salamí et al., ປີ 2014; ຕໍເຣສ-ສ Anchez, Lopez-´ Granados, Serrano, et al., 2015; Zahawi et al., 2015; Zarco-Tejada et al, 2014) |
| 6 | ການເຝົ້າລະວັງກະສິກໍາ | (SR Herwitz et al., 2004; Hunt et al., 2010; CCD Lelong et al., ປີ 2008; Primicerio et al., 2012; ຊຽງ & Tian, 2011) |
ນອກຈາກນັ້ນ, drones ແມ່ນເປັນປະໂຫຍດສໍາລັບວຽກງານທີ່ທ້າທາຍໃນກະສິກໍາ, ລວມທັງການສ້າງແຜນທີ່ຫຍ້າ. ຮູບພາບທີ່ຈັບໄດ້ໂດຍອຸປະກອນໄດ້ພິສູດໃຫ້ເຫັນເຖິງຄວາມເປັນປະໂຫຍດສໍາລັບການກວດຫາຫຍ້າໃນທົ່ງນາກ່ອນໄວອັນຄວນ (de Castro et al., 2018; Jim'enez-Brenes et al., 2017; Lam et al., 2021; Lopez-Granados ´ et al., 2016; Rozenberg et al., 2021). ໃນເລື່ອງນີ້, de Castro et al. (2018) ຖືວ່າການລວມຮູບພາບ UAV ແລະການວິເຄາະຮູບພາບທີ່ອີງໃສ່ວັດຖຸ (OBIA) ໄດ້ເຮັດໃຫ້ຜູ້ປະຕິບັດສາມາດເອົາຊະນະບັນຫາການກວດພົບອັດຕະໂນມັດໃນຕົ້ນຫຍ້າໃນຕົ້ນລະດູ, ເຊິ່ງເປັນບາດກ້າວອັນໃຫຍ່ຫຼວງຕໍ່ການຄົ້ນຄວ້າຫຍ້າ. ເຊັ່ນດຽວກັນ, Pena ˜ et al. (2013) ຊີ້ໃຫ້ເຫັນວ່າການນໍາໃຊ້ຮູບພາບທີ່ມີຄວາມລະອຽດສູງທາງດ້ານພື້ນທີ່ສູງຈາກ UAV ສົມທົບກັບຂັ້ນຕອນຂອງ OBIA ເຮັດໃຫ້ມັນເປັນໄປໄດ້ທີ່ຈະສ້າງແຜນທີ່ວັດສະພືດໃນການປູກສາລີຕົ້ນທີ່ສາມາດນໍາໃຊ້ໃນການວາງແຜນການປະຕິບັດມາດຕະການຄວບຄຸມວັດສະພືດໃນລະດູການ, ວຽກງານທີ່ເກີນຄວາມສາມາດຂອງດາວທຽມ ແລະພາບຖ່າຍທາງອາກາດແບບດັ້ງເດີມ. ເມື່ອປຽບທຽບກັບການຈັດປະເພດຮູບພາບ ຫຼື ຂັ້ນຕອນການກວດຫາວັດຖຸ, ເຕັກນິກການແບ່ງສ່ວນແບບ semantic ແມ່ນມີປະສິດທິພາບຫຼາຍຂຶ້ນໃນວຽກງານແຜນທີ່ວັດສະພືດ (J. Deng et al., 2020), ດັ່ງນັ້ນຈຶ່ງເຮັດໃຫ້ຊາວກະສິກອນສາມາດກວດຫາສະພາບທົ່ງນາ, ຫຼຸດຜ່ອນການສູນເສຍ ແລະ ປັບປຸງຜົນຜະລິດຕະຫຼອດລະດູການປູກ (Ramesh et al., 2020). ການແບ່ງສ່ວນ semantic ໂດຍອີງໃສ່ການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງຍັງສາມາດສະຫນອງການວັດແທກທີ່ຖືກຕ້ອງຂອງການປົກຫຸ້ມຂອງພືດຈາກຮູບພາບທາງອາກາດທີ່ມີຄວາມລະອຽດສູງ (Ramesh et al., 2020; A. Zheng et al., 2022). ເຖິງວ່າຈະມີທ່າແຮງຂອງເຂົາເຈົ້າສໍາລັບການຫ່າງໄກສອກຫຼີກ
ການຮັບຮູ້ການຈັດປະເພດ pixels ລວງ, ເຕັກນິກການແບ່ງສ່ວນ semantic ຮຽກຮ້ອງໃຫ້ມີການຄິດໄລ່ທີ່ສໍາຄັນແລະຄວາມຊົງຈໍາ GPU ສູງທີ່ຫ້າມ (J. Deng et al., 2020).
ອີງໃສ່ການຮຽນຮູ້ຂອງເຄື່ອງຈັກ ແລະ UAV, P'erez-Ortiz et al. (2015) ໄດ້ແນະນຳວິທີການສ້າງແຜນຜັງວັດສະພືດເພື່ອສະໜອງຍຸດທະສາດການຄວບຄຸມວັດສະພືດສະເພາະສະຖານທີ່ ເມື່ອຊາວກະສິກອນນຳໃຊ້ການຄວບຄຸມວັດສະພືດກ່ອນເກີດ. ສຸດທ້າຍ, Rasmussen et al. (2013) ໄດ້ເນັ້ນໃຫ້ເຫັນວ່າ drones ສະຫນອງການຮັບຮູ້ລາຄາບໍ່ແພງກັບຄວາມຍືດຫຍຸ່ນການແກ້ໄຂທາງກວ້າງຂອງພື້ນທີ່ຍິ່ງໃຫຍ່. ໂດຍລວມແລ້ວ, ສິ່ງພິມໃນກຸ່ມນີ້ເນັ້ນໃສ່ການສຳຫຼວດທ່າແຮງຂອງ UAVs ເພື່ອຮອງຮັບການຮັບຮູ້ທາງໄກ, ການຕິດຕາມການປູກພືດ ແລະ ການສ້າງແຜນທີ່ຫຍ້າ. ຈໍາເປັນຕ້ອງມີການຄົ້ນຄວ້າໃນຄວາມເລິກຕື່ມອີກ ເພື່ອສືບສວນຕື່ມອີກວ່າ ການນຳໃຊ້ drone ໃນການຕິດຕາມສິ່ງແວດລ້ອມ, ການຄຸ້ມຄອງການປູກພືດ, ແລະ ການສ້າງແຜນທີ່ຫຍ້າສາມາດບັນລຸການກະສິກໍາແບບຍືນຍົງຫຼາຍຂຶ້ນ (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. . Su, Liu, et al., 2018) ແລະແກ້ໄຂບັນຫາການປົກຄອງຂອງເຕັກໂນໂລຢີນີ້ໃນຄໍາຮ້ອງສະຫມັກປະກັນໄພການປູກພືດ (Basnet & Bang, 2018; Chamuah & Singh, 2019, 2022; Meinen & Robinson, 2021). ນັກຄົ້ນຄວ້າຄວນສຸມໃສ່ການກວດສອບການວັດແທກ UAV ທີ່ລວບລວມດ້ວຍເຕັກນິກການປຸງແຕ່ງທີ່ມີປະສິດທິພາບເພື່ອເພີ່ມປະສິດທິພາບຂອງຂໍ້ມູນທີ່ຖືກປຸງແຕ່ງ (Manfreda et al., 2018). ນອກຈາກນັ້ນ, ການພັດທະນາລະບົບສູດການຄິດໄລ່ທີ່ເຫມາະສົມທີ່ຮັບຮູ້ pixels ທີ່ສະແດງຫຍ້າໃນຮູບພາບດິຈິຕອນແລະກໍາຈັດພື້ນຫລັງທີ່ບໍ່ກ່ຽວຂ້ອງໃນລະຫວ່າງການສ້າງແຜນທີ່ຫຍ້າ UAV (Gaˇsparovi´c et al., 2020; Hamylton et al., 2020; H. Huang et al. , 2018, 2020; Lopez- ´ Granados et al., 2016). ການຄົ້ນຄວ້າເພີ່ມເຕີມກ່ຽວກັບການຮັບຮອງເອົາເຕັກນິກການແບ່ງສ່ວນ semantic ໃນການຮັບຮູ້ພືດ, ການຈັດປະເພດໃບ, ແລະການສ້າງແຜນທີ່ພະຍາດແມ່ນຍິນດີຕ້ອນຮັບ (Fuentes-Pacheco et al., 2019; Kerkech et al., 2020).
ກຸ່ມ 2. ສິ່ງພິມໃນກຸ່ມນີ້ ໄດ້ສຸມໃສ່ຫຼາຍດ້ານຂອງ drones ກະສິກໍາ. ກ່ຽວຂ້ອງກັບ phenotyping ຫ່າງໄກສອກຫຼີກ, Sankaran et al. (2015) ໄດ້ທົບທວນຄືນທ່າແຮງຂອງການນໍາໃຊ້ພາບຖ່າຍທາງອາກາດໃນລະດັບຄວາມສູງຕ່ໍາ, ຄວາມລະອຽດສູງກັບ UAVs ສໍາລັບການ phenotyping ໄວຂອງການປູກພືດໃນພາກສະຫນາມ, ແລະພວກເຂົາເຈົ້າໂຕ້ຖຽງວ່າ, ເມື່ອປຽບທຽບກັບເວທີການຮັບຮູ້ພື້ນດິນ, UAVs ຂະຫນາດນ້ອຍທີ່ມີເຊັນເຊີທີ່ພຽງພໍສະເຫນີຂໍ້ໄດ້ປຽບຫຼາຍ. , ເຊັ່ນການເຂົ້າເຖິງສະຫນາມໄດ້ງ່າຍຂຶ້ນ, ຂໍ້ມູນຄວາມລະອຽດສູງ, ການເກັບກໍາຂໍ້ມູນປະສິດທິພາບ,
ການປະເມີນຢ່າງວ່ອງໄວຂອງເງື່ອນໄຂການຂະຫຍາຍຕົວພາກສະຫນາມ, ແລະຄ່າໃຊ້ຈ່າຍການດໍາເນີນງານຕ່ໍາ. ຢ່າງໃດກໍຕາມ, ຜູ້ຂຽນຍັງສັງເກດວ່າການນໍາໃຊ້ປະສິດທິພາບຂອງ UAV ສໍາລັບ phenotyping ພາກສະຫນາມແມ່ນອີງໃສ່ສອງອົງປະກອບພື້ນຖານ, ຄື, ຄຸນນະສົມບັດ UAV (ຕົວຢ່າງ, ຄວາມປອດໄພ, ຄວາມຫມັ້ນຄົງ, ຕໍາແຫນ່ງ, ເອກະລາດ) ແລະຄຸນລັກສະນະຂອງເຊັນເຊີ (e. g. ຄວາມລະອຽດ, ນ້ໍາຫນັກ, wavelengths spectral, ພາກສະຫນາມ. ທັດສະນະ). Haghighattalab et al. (2016) ໄດ້ສະເໜີທໍ່ການປະມວນຜົນຮູບເຄິ່ງອັດຕະໂນມັດເພື່ອດຶງຂໍ້ມູນລະດັບດິນຕອນຈາກຮູບພາບ UAV ແລະເລັ່ງຂະບວນການປັບປຸງພັນ. Holman et al. (2016) ພັດທະນາສູງ
throughput field phenotyping system ແລະເນັ້ນວ່າ UAV ສາມາດເກັບກໍາຂໍ້ມູນ phenotypic ທີ່ມີຄຸນນະພາບ, voluminous, ພາກສະຫນາມ, ແລະອຸປະກອນແມ່ນປະສິດທິພາບສໍາລັບພື້ນທີ່ຂະຫນາດໃຫຍ່ແລະໃນທົ່ວສະຖານທີ່ພາກສະຫນາມທີ່ແຕກຕ່າງກັນ.
ເນື່ອງຈາກການປະເມີນຜົນຜະລິດແມ່ນຂໍ້ມູນທີ່ສໍາຄັນຢ່າງບໍ່ຫນ້າເຊື່ອ, ໂດຍສະເພາະໃນເວລາທີ່ມີຢູ່ໃນເວລາ, ມີທ່າແຮງສໍາລັບ UAVs ທີ່ຈະສະຫນອງການວັດແທກພາກສະຫນາມທັງຫມົດແລະໄດ້ຮັບຂໍ້ມູນທີ່ມີຄຸນນະພາບສູງຢ່າງມີປະສິດທິພາບ (Daakir et al., 2017; Demir et al., 2018. ; Enciso et al., 2019; Kulbacki et al., 2018; Pudelko et al., 2012). ໃນເລື່ອງນີ້, Jin et al. (2017) ໄດ້ໃຊ້ປະໂຫຍດຈາກຮູບພາບຄວາມລະອຽດສູງທີ່ໄດ້ຮັບໂດຍ UAVs ໃນລະດັບຄວາມສູງຕໍ່າຫຼາຍເພື່ອພັດທະນາ ແລະປະເມີນວິທີການປະເມີນຄວາມໜາແໜ້ນຂອງພືດສາລີໃນຂັ້ນຕອນການເກີດ. ອີງຕາມຜູ້ຂຽນ, UAVs ເອົາຊະນະຂໍ້ຈໍາກັດຂອງລະບົບ rover ທີ່ມີກ້ອງຖ່າຍຮູບແລະເປັນຕົວແທນຂອງວິທີການທີ່ບໍ່ມີການບຸກລຸກເພື່ອຄາດຄະເນຄວາມຫນາແຫນ້ນຂອງພືດໃນການປູກພືດ, ຊ່ວຍໃຫ້ຊາວກະສິກອນສາມາດບັນລຸຜົນຜະລິດສູງທີ່ຈໍາເປັນສໍາລັບການ phenotyping ພາກສະຫນາມໂດຍເອກະລາດຂອງການຈະລາຈອນຂອງດິນ. Li et al. (2016) ໄດ້ລວບລວມຫຼາຍຮ້ອຍຮູບພາບສະເຕີລິໂອທີ່ມີຄວາມລະອຽດສູງທີ່ສຸດໂດຍໃຊ້ລະບົບ UAV ເພື່ອຄາດຄະເນພາລາມິເຕີຂອງສາລີ, ລວມທັງຄວາມສູງຂອງເຮືອນຍອດແລະຊີວະມວນຈາກພື້ນດິນ. ສຸດທ້າຍ, Yue et al. (2017) ພົບວ່າລະດັບຄວາມສູງຂອງການປູກພືດທີ່ກຳນົດຈາກ UAVs ສາມາດເພີ່ມການປະເມີນຊີວະມວນຢູ່ເໜືອພື້ນດິນ (AGB).
ວິທີການຕິດຕາມການຂະຫຍາຍຕົວຂອງພືດແມ່ນແນວຄວາມຄິດຂອງການພັດທະນາແບບຈໍາລອງຫນ້າດິນຂອງພືດ (Bendig et al., 2014, 2015; Holman et al., 2016; Panday, Shrestha, et al., 2020; Sumesh et al., 2021). ການສຶກສາຈໍານວນຫນຶ່ງຊີ້ໃຫ້ເຫັນຄວາມເປັນໄປໄດ້ຂອງຮູບພາບທີ່ຖ່າຍຈາກ UAV ເພື່ອເກັບກໍາຄວາມສູງຂອງພືດແລະຕິດຕາມການຂະຫຍາຍຕົວຂອງມັນ. ຕົວຢ່າງ, Bendig et al. (2013) ໄດ້ອະທິບາຍເຖິງການພັດທະນາແບບຈໍາລອງພື້ນຜິວການປູກພືດຫຼາຍຊົ່ວໄລຍະທີ່ມີຄວາມລະອຽດສູງຕໍ່າກວ່າ 0.05 m ໂດຍໃຊ້ UAV. ພວກເຂົາເຈົ້າມີຈຸດປະສົງເພື່ອກວດພົບການປູກພືດ
ການປ່ຽນແປງຂອງການເຕີບໂຕແລະການເພິ່ງພາອາໄສຂອງມັນໃນການປິ່ນປົວພືດ, ການປູກຝັງ, ແລະຄວາມກົດດັນ. Bendig et al. (2014) ໄດ້ໃຊ້ UAVs ເພື່ອຄາດຄະເນຊີວະມວນສົດ ແລະ ແຫ້ງ ໂດຍອີງໃສ່ຄວາມສູງຂອງພືດທີ່ສະກັດມາຈາກແບບຈໍາລອງພື້ນຜິວຂອງພືດ ແລະພົບວ່າ, ບໍ່ເຫມືອນກັບເວທີທາງອາກາດແລະການສະແກນເລເຊີເທິງບົກ, ຮູບພາບທີ່ມີຄວາມລະອຽດສູງຈາກ UAVs ສາມາດເພີ່ມຄວາມຖືກຕ້ອງຂອງການສ້າງແບບຈໍາລອງຄວາມສູງຂອງພືດສໍາລັບການຂະຫຍາຍຕົວທີ່ແຕກຕ່າງກັນຢ່າງຫຼວງຫຼາຍ. ໄລຍະ. ໃນເສັ້ນເລືອດດຽວກັນ, Geipel et al. (2014) ໄດ້ໃຊ້ UAVs ໃນການຄົ້ນຄວ້າຂອງເຂົາເຈົ້າເພື່ອໃຫ້ໄດ້ຮູບພາບ
ຊຸດຂໍ້ມູນສໍາລັບການຄາດຄະເນຜົນຜະລິດຂອງເມັດສາລີໃນສາມໄລຍະການຂະຫຍາຍຕົວທີ່ແຕກຕ່າງກັນຈາກຕົ້ນຫາກາງລະດູການແລະໄດ້ສະຫຼຸບວ່າການລວມຕົວແບບຈໍາລອງທາງ spectral ແລະ spatial ໂດຍອີງໃສ່ຮູບພາບທາງອາກາດແລະແບບຈໍາລອງດ້ານການປູກພືດແມ່ນວິທີການທີ່ເຫມາະສົມສໍາລັບການຄາດຄະເນຜົນຜະລິດສາລີກາງລະດູການ. ສຸດທ້າຍ, Gnadinger ¨ ແລະ Schmidhalter (2017) ໄດ້ກວດເບິ່ງຜົນປະໂຫຍດຂອງ UAV ໃນ phenotyping ຄວາມແມ່ນຍໍາແລະເນັ້ນຫນັກວ່າການນໍາໃຊ້ເຕັກໂນໂລຢີນີ້ສາມາດເສີມຂະຫຍາຍການຄຸ້ມຄອງກະສິກໍາແລະເຮັດໃຫ້ການທົດລອງພາກສະຫນາມເພື່ອຈຸດປະສົງການປັບປຸງພັນແລະກະສິກໍາ. ໂດຍລວມແລ້ວ, ພວກເຮົາສັງເກດເຫັນວ່າສິ່ງພິມໃນກຸ່ມ 2 ເນັ້ນໃສ່ຂໍ້ໄດ້ປຽບຕົ້ນຕໍຂອງ UAVs ໃນຫ່າງໄກສອກຫຼີກ
phenotyping, ການຄາດຄະເນຜົນຜະລິດ, ການສ້າງແບບຈໍາລອງຫນ້າດິນຂອງພືດ, ແລະການນັບພືດ. ການສຶກສາໃນອະນາຄົດສາມາດຂຸດເລິກໄດ້ໂດຍການພັດທະນາວິທີການໃຫມ່ສໍາລັບການ phenotyping ຫ່າງໄກສອກຫຼີກທີ່ສາມາດອັດຕະໂນມັດແລະເພີ່ມປະສິດທິພາບການປະມວນຜົນຂໍ້ມູນຄວາມຮູ້ສຶກຫ່າງໄກສອກຫຼີກ (Barabaschi et al., 2016; Liebisch et al., 2015; Mochida et al., 2015; S. Zhou et al. ., 2021). ນອກຈາກນັ້ນ, ການປະຕິບັດຂອງເຊັນເຊີ IoT ທີ່ຕິດຕັ້ງຢູ່ໃນ UAVs ແລະການຄ້າລະຫວ່າງຄ່າໃຊ້ຈ່າຍ, ແຮງງານ, ແລະຄວາມແມ່ນຍໍາຂອງການຄາດຄະເນຜົນຜະລິດຂອງເຂົາເຈົ້າຈໍາເປັນຕ້ອງໄດ້ຄົ້ນຄ້ວາຢູ່ໃນ.
ອະນາຄົດ (Ju & Son, 2018a, 2018b; Xie & Yang, 2020; Yue et al., 2018). ໃນທີ່ສຸດ, ຈໍາເປັນຕ້ອງໄດ້ພັດທະນາວິທີການປຸງແຕ່ງຮູບພາບທີ່ມີປະສິດທິພາບທີ່ສາມາດສ້າງຂໍ້ມູນທີ່ເຊື່ອຖືໄດ້, ເພີ່ມປະສິດທິພາບການຜະລິດກະສິກໍາ, ແລະຫຼຸດຜ່ອນການຄິດໄລ່ຄູ່ມືຂອງຊາວກະສິກອນ (RU Khan et al., 2021; Koh et al., 2021; Lin. & Guo, 2020; C. Zhang et al., 2020).
ກຸ່ມ 3. ສິ່ງພິມໃນກຸ່ມນີ້ສົນທະນາກ່ຽວກັບປະເພດຕ່າງໆຂອງລະບົບການຖ່າຍຮູບສຳລັບການຮັບຮູ້ທາງໄກຂອງຊັບພະຍາກອນກະສິກຳທີ່ໃຊ້ໃນເວທີ UAV. ໃນເລື່ອງນີ້, ການຖ່າຍຮູບຄວາມຮ້ອນຊ່ວຍໃຫ້ມີການກວດສອບອຸນຫະພູມຫນ້າດິນເພື່ອປ້ອງກັນຄວາມເສຍຫາຍຂອງພືດແລະກວດພົບຄວາມກົດດັນຈາກໄພແຫ້ງແລ້ງໃນໄວ (Awais et al., 2022; García-Tejero et al., 2018; Sankaran et al., 2015; Santesteban et al., 2017; Yeom, 2021). Baluja et al. (2012) ຢືນຢັນວ່າການນໍາໃຊ້ກ້ອງຖ່າຍຮູບ multispectral ແລະຄວາມຮ້ອນ onboard ໄດ້
UAV ຊ່ວຍໃຫ້ນັກຄົ້ນຄວ້າໄດ້ຮູບພາບທີ່ມີຄວາມລະອຽດສູງ ແລະປະເມີນສະຖານະຂອງນ້ຳເຄືອ. ນີ້ອາດຈະເປັນປະໂຫຍດໃນການພັດທະນາແບບຈໍາລອງການກໍານົດເວລານ້ໍາແບບໃຫມ່ໂດຍໃຊ້ຂໍ້ມູນການຮັບຮູ້ທາງໄກ (Baluja et al., 2012). ເນື່ອງຈາກວ່າ
ຄວາມອາດສາມາດໂຫຼດໄດ້ຈໍາກັດຂອງ UAVs, Ribeiro-Gomes et al. (2017) ໄດ້ພິຈາລະນາການລວມເອົາກ້ອງຖ່າຍຮູບຄວາມຮ້ອນທີ່ບໍ່ລະບາຍຄວາມຮ້ອນເຂົ້າໄປໃນ UAVS ເພື່ອກໍານົດຄວາມກົດດັນນ້ໍາໃນພືດ, ເຊິ່ງເຮັດໃຫ້ UAVs ປະເພດນີ້ມີປະສິດທິພາບແລະມີປະສິດທິພາບຫຼາຍກ່ວາການຮັບຮູ້ທາງໄກຈາກດາວທຽມແບບດັ້ງເດີມແລະ UAVs ທີ່ມີກ້ອງຖ່າຍຮູບຄວາມຮ້ອນເຢັນ. ອີງຕາມຜູ້ຂຽນ, ກ້ອງຖ່າຍຮູບຄວາມຮ້ອນ uncooled ແມ່ນສີມ້ານກວ່າກ້ອງຖ່າຍຮູບ cooled, ຮຽກຮ້ອງໃຫ້ມີການປັບທີ່ເຫມາະສົມ. Gonzalez-Dugo et al. (2014) ສະແດງໃຫ້ເຫັນວ່າຮູບພາບຄວາມຮ້ອນສ້າງແຜນທີ່ພື້ນທີ່ຂອງຕົວຊີ້ວັດຄວາມກົດດັນນ້ໍາຜົນລະປູກເພື່ອປະເມີນສະຖານະການນ້ໍາແລະປະລິມານຄວາມກົດດັນນ້ໍາລະຫວ່າງແລະພາຍໃນສວນຫມາກນາວ. Gonzalez-Dugo et al. (2013) ແລະ Santesteban et al. (2017) ໄດ້ສືບສວນການນໍາໃຊ້ຮູບພາບຄວາມຮ້ອນ UAV ຄວາມລະອຽດສູງເພື່ອປະເມີນຄວາມປ່ຽນແປງຂອງສະຖານະນ້ໍາຂອງສວນໝາກໄມ້ທາງການຄ້າ ແລະສວນອະງຸ່ນ.
ການຖ່າຍພາບແບບ Multispectral ສາມາດສະໜອງຂໍ້ມູນຂະໜາດໃຫຍ່ໄດ້ເມື່ອປຽບທຽບກັບຮູບພາບ RGB (ສີແດງ, ສີຂຽວ, ແລະສີຟ້າ) ແບບດັ້ງເດີມ (Ad˜ ao et al., 2017; Navia et al., 2016). ຂໍ້ມູນ spectral ນີ້, ຄຽງຄູ່ກັບຂໍ້ມູນທາງກວ້າງຂອງພື້ນ, ສາມາດຊ່ວຍໃນການຈັດປະເພດ, ແຜນທີ່, ການຄາດຄະເນ, ການຄາດຄະເນ, ແລະຈຸດປະສົງການຊອກຄົ້ນຫາ (Berni et al., 2009b). ອີງຕາມ Candiago et al. (2015), ການຖ່າຍພາບຫຼາຍສີທີ່ອີງໃສ່ UAV ສາມາດປະກອບສ່ວນຢ່າງຫຼວງຫຼາຍຕໍ່ການປະເມີນການປູກພືດ ແລະ ການກະເສດທີ່ຊັດເຈນເປັນຊັບພະຍາກອນທີ່ເຊື່ອຖືໄດ້ ແລະ ມີປະສິດທິພາບ. ນອກຈາກນີ້,
Khaliq et al. (2019) ໄດ້ເຮັດການປຽບທຽບລະຫວ່າງດາວທຽມ ແລະ ການຖ່າຍພາບຫຼາຍແວ່ນຕາຂອງ UAV. ຮູບພາບທີ່ອີງໃສ່ UAV ໄດ້ສົ່ງຜົນໃຫ້ມີຄວາມຊັດເຈນຫຼາຍຂຶ້ນໃນການອະທິບາຍຄວາມປ່ຽນແປງຂອງສວນອະງຸ່ນເຊັ່ນດຽວກັນກັບແຜນທີ່ທີ່ເຂັ້ມແຂງສໍາລັບການເປັນຕົວແທນຂອງການປູກພືດ. ສະຫຼຸບໂດຍຫຍໍ້, ບົດຄວາມໃນກຸ່ມນີ້ເວົ້າເຖິງການລວມເອົາເຊັນເຊີການຖ່າຍຮູບຄວາມຮ້ອນ ແລະຫຼາຍສີເຂົ້າໃນ UAVs ກະສິກໍາ. ຕາມນັ້ນແລ້ວ, ການຄົ້ນຄວ້າເພີ່ມເຕີມແມ່ນຈໍາເປັນເພື່ອເຂົ້າໃຈວິທີການຮູບພາບຄວາມຮ້ອນແລະຫຼາຍສະເປັກສາມາດປະສົມປະສານກັບ AI
ເຕັກນິກ (ຕົວຢ່າງ, ການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງ) ເພື່ອກວດພົບຄວາມກົດດັນຂອງພືດ (Ampatzidis et al., 2020; Ampatzidis & Partel, 2019; Jung et al., 2021; Santesteban et al., 2017; Syeda et al., 2021). ຄວາມເຂົ້າໃຈດັ່ງກ່າວຈະຊ່ວຍໃຫ້ການກວດສອບປະສິດທິພາບແລະຖືກຕ້ອງຫຼາຍຂຶ້ນເຊັ່ນດຽວກັນກັບການຕິດຕາມການຂະຫຍາຍຕົວຂອງພືດ, ຄວາມກົດດັນ, ແລະ phenology (Buters et al., 2019; Cao et al., 2020; Neupane & BaysalGurel, 2021; L. Zhou et al., 2020).
ກຸ່ມ 4. ກຸ່ມນີ້ປະກອບດ້ວຍເອກະສານ 2009 ສະບັບທີ່ໝູນວຽນກ່ຽວກັບບົດບາດສຳຄັນຂອງການຖ່າຍພາບສະເປກທຣາ ແລະ ການຖ່າຍຮູບ hyperspectral ໃນການສະໜັບສະໜູນການກະເສດ. ການຖ່າຍຮູບ Hyperspectral ໄດ້ຕັ້ງຕົວມັນເອງເປັນວິທີການຮັບຮູ້ທາງໄກທີ່ເຮັດໃຫ້ການປະເມີນປະລິມານຂອງລະບົບແຜ່ນດິນໂລກ (Schaepman et al., XNUMX). ເພື່ອໃຫ້ມີຄວາມຊັດເຈນຫຼາຍຂຶ້ນ, ມັນຊ່ວຍໃຫ້ການກໍານົດວັດສະດຸດ້ານຫນ້າ, ປະລິມານຂອງຄວາມເຂັ້ມຂົ້ນຂອງ (ພີ່ນ້ອງ) ແລະ. ການກໍານົດອັດຕາສ່ວນອົງປະກອບຂອງຫນ້າດິນ
ພາຍໃນ pixels ປະສົມ (Kirsch et al., 2018; Zhao et al., 2022). ໃນຄໍາສັບຕ່າງໆອື່ນໆ, ຄວາມລະອຽດສູງກວ່າທີ່ສະຫນອງໃຫ້ໂດຍລະບົບ hyperspectral ເຮັດໃຫ້ການຄາດຄະເນທີ່ຖືກຕ້ອງຫຼາຍຂອງຕົວກໍານົດການຕ່າງໆ, ເຊັ່ນ: ຄຸນສົມບັດອາຫານສັດຫຼືເນື້ອໃນນ້ໍາໃບ (Suomalainen et al., 2014). ນັກຄົ້ນຄວ້າຢູ່ໃນກຸ່ມນີ້ໄດ້ສືບສວນລັກສະນະຕ່າງໆຂອງລະບົບດັ່ງກ່າວ. ໃນບັນດາຄົນອື່ນ, Aasen et al. (2015b) ໄດ້ສະເຫນີວິທີການທີ່ເປັນເອກະລັກສໍາລັບການໄດ້ຮັບຂໍ້ມູນ hyperspectral ສາມມິຕິລະດັບຈາກນ້ໍາຫນັກເບົາ
ກ້ອງຖ່າຍພາບທີ່ໃຊ້ໃນ UAVs ສໍາລັບການຕິດຕາມພືດ. Lucieer et al. (2014) ໄດ້ປຶກສາຫາລືກ່ຽວກັບການອອກແບບ, ການພັດທະນາ, ແລະການດໍາເນີນການທາງອາກາດຂອງ Novell hyperspectral UAS ເຊັ່ນດຽວກັນກັບການປັບຕົວ, ການວິເຄາະແລະການຕີຄວາມຫມາຍຂອງຂໍ້ມູນຮູບພາບທີ່ເກັບກໍາກັບມັນ. ສຸດທ້າຍ, Honkavaara et al. (2013b) ໄດ້ພັດທະນາວິທີການປຸງແຕ່ງທີ່ສົມບູນແບບສໍາລັບຮູບພາບ spectral ທີ່ອີງໃສ່ FabryPerot interferometer ແລະສະແດງໃຫ້ເຫັນການນໍາໃຊ້ຂອງມັນໃນຂັ້ນຕອນການຄາດຄະເນຊີວະມວນສໍາລັບການກະສິກໍາຄວາມແມ່ນຍໍາ. ເສັ້ນທາງໃນອະນາຄົດທີ່ມີທ່າແຮງສໍາລັບກຸ່ມປະຈຸບັນນີ້ປະກອບມີການເນັ້ນຫນັກໃສ່ຄວາມຕ້ອງການສໍາລັບການປັບປຸງດ້ານວິຊາການໃນເຕັກໂນໂລຢີເຊັນເຊີ (Aasen et al., 2015b) ເຊັ່ນດຽວກັນກັບຄວາມຕ້ອງການສໍາລັບການລວມເອົາແລະເສີມຂະຫຍາຍເຕັກໂນໂລຢີ, ໂດຍສະເພາະຂໍ້ມູນໃຫຍ່ແລະການວິເຄາະ (Ang & Seng, 2021; Radoglou -Grammatikis et al., 2020; Shakoor et al., 2019). ອັນສຸດທ້າຍສ່ວນໃຫຍ່ແມ່ນມາຈາກຂໍ້ມູນການຂະຫຍາຍຕົວຢ່າງຕໍ່ເນື່ອງທີ່ສ້າງຂຶ້ນໂດຍເຊັນເຊີຕ່າງໆທີ່ປະຕິບັດຢູ່ໃນກະສິກໍາສະຫຼາດ (C. Li & Niu, 2020; A. Rejeb et al., 2022; Y. Su & Wang, 2021).
Cluster 5. ສິ່ງພິມໃນກຸ່ມນີ້ໄດ້ກວດສອບແອັບພລິເຄຊັນ 3Dmapping ທີ່ອີງໃສ່ drones. ການນໍາໃຊ້ drones ສໍາລັບການສ້າງແຜນທີ່ 3D ສາມາດຫຼຸດຜ່ອນການເຮັດວຽກພາກສະຫນາມທີ່ສັບສົນແລະເພີ່ມປະສິດທິພາບຢ່າງຫຼວງຫຼາຍ (Torres-Sanchez ´ et al., 2015). ຫ້າບົດຄວາມໃນກຸ່ມສ່ວນໃຫຍ່ແມ່ນເນັ້ນໃສ່ຄໍາຮ້ອງສະຫມັກການຕິດຕາມພືດ. ສໍາລັບຕົວຢ່າງ, ເພື່ອໃຫ້ໄດ້ຮັບຂໍ້ມູນສາມມິຕິລະດັບກ່ຽວກັບພື້ນທີ່ເຮືອນຍອດ, ຄວາມສູງຂອງຕົ້ນໄມ້, ແລະປະລິມານຂອງມົງກຸດ, Torres-Sanchez ´ et al. (2015) ໄດ້ນຳໃຊ້ເທັກໂນໂລຍີ UAV ເພື່ອສ້າງຕົວແບບດ້ານດິຈິຕອລ ແລະຫຼັງຈາກນັ້ນ ການວິເຄາະຮູບພາບທີ່ອີງໃສ່ວັດຖຸ (OBIA). ນອກຈາກນັ້ນ, Zarco-Tejada et al. (2014) ລະດັບຄວາມສູງຂອງຕົ້ນໄມ້ໂດຍການລວມເອົາເທກໂນໂລຍີ UAV ແລະວິທີການຟື້ນຟູຮູບສາມມິຕິ. Jim'enez-Brenes Lopez-Granados, ' De Castro, et al. (2017) ສະແດງໃຫ້ເຫັນຂະບວນການໃຫມ່ສໍາລັບຫຼາຍຊົ່ວຄາວ, ການກວດສອບ 3D ຂອງຫຼາຍສິບຕົ້ນຫມາກກອກເທດໂດຍການລວມເອົາເຕັກໂນໂລຊີ UAV ກັບວິທີການ OBIA ກ້າວຫນ້າທາງດ້ານ. ເສັ້ນທາງທີ່ຫນ້າສົນໃຈສໍາລັບວຽກງານໃນອະນາຄົດໃນກຸ່ມນີ້ປະກອບມີການປັບປຸງໃນປະຈຸບັນ
ວິທີການ (Zarco-Tejada et al., 2014) ສໍາລັບຈຸດປະສົງການສ້າງແບບຈໍາລອງພື້ນຜິວດິຈິຕອນ (Ajayi et al., 2017; Jaud et al., 2016), ເຊັ່ນ: OBIA (de Castro et al., 2018, 2020; Ventura et al. , 2018), ແລະການປະຕິສັງຂອນຮູບຫຼືການພັດທະນາວິທີການນະວະນິຍາຍ (Díaz-Varela et al., 2015; Torres-S´ anchez et al., 2015).
ກຸ່ມ 6. ກຸ່ມນີ້ສົນທະນາກ່ຽວກັບບົດບາດຂອງ drones ໃນການເຝົ້າລະວັງກະສິກໍາ. UAVs ສາມາດເສີມແລະເອົາຊະນະຂໍ້ບົກຜ່ອງຂອງພາບຖ່າຍດາວທຽມແລະເຮືອບິນ. ຕົວຢ່າງ, ພວກເຂົາສາມາດສະຫນອງຄວາມລະອຽດສູງຢູ່ໃກ້ກັບຮູບພາບໃນເວລາທີ່ແທ້ຈິງທີ່ມີນໍ້າມັນຫນ້ອຍລົງຫຼືສິ່ງທ້າທາຍໃນການທົດລອງ, ເຮັດໃຫ້ມີການເຝົ້າລະວັງຢ່າງຕໍ່ເນື່ອງແລະໃນເວລາທີ່ແທ້ຈິງແລະການປັບປຸງການຕັດສິນໃຈ (S. Herwitz et al., 2004). ການປະກອບສ່ວນທີ່ສໍາຄັນອີກອັນຫນຶ່ງຂອງ UAVs ແມ່ນຄວາມສາມາດຂອງພວກເຂົາໃນການສະຫນອງຂໍ້ມູນສະເພາະເວັບໄຊທ໌ສໍາລັບການກະສິກໍາທີ່ຊັດເຈນຫຼືການກະສິກໍາສະເພາະຂອງສະຖານທີ່ເປັນຄວາມລະອຽດສູງຂອງພວກເຂົາ, ຂໍ້ມູນລາຍລະອຽດກ່ຽວກັບຕົວກໍານົດການຕ່າງໆເຮັດໃຫ້ຊາວກະສິກອນສາມາດແບ່ງດິນເປັນສ່ວນດຽວກັນແລະປະຕິບັດຕໍ່ພວກເຂົາຕາມຄວາມເຫມາະສົມ (Hunt et al. , 2010; CC Lelong et al., 2008; Primicerio et al., 2012). ການເຝົ້າລະວັງກະສິກໍາທີ່ອີງໃສ່ UAV ດັ່ງກ່າວສາມາດສະຫນັບສະຫນູນການກວດສອບຄວາມປອດໄພດ້ານສະບຽງອາຫານແລະການຕັດສິນໃຈ (SR Herwitz et al., 2004). ເພື່ອຄວາມກ້າວຫນ້າຂອງການຄົ້ນຄວ້າໃນການເຝົ້າລະວັງກະສິກໍາ, ບໍ່ພຽງແຕ່ການປັບປຸງໃນ sensors, UAVs, ແລະເຕັກໂນໂລຢີທີ່ກ່ຽວຂ້ອງອື່ນໆແລະວິທີການສື່ສານແລະການໂອນຂໍ້ມູນຂອງພວກເຂົາແມ່ນຈໍາເປັນ (Ewing et al., 2020; Shuai et al., 2019), ແຕ່ຍັງປະສົມປະສານ drones ກັບຕ່າງໆ. ເຕັກໂນໂລຢີສໍາລັບການເພີ່ມປະສິດທິພາບວຽກງານທີ່ແຕກຕ່າງກັນທີ່ກ່ຽວຂ້ອງກັບກະສິກໍາສະຫມາດ, ເຊັ່ນ: ການຕິດຕາມ, ການເຝົ້າລະວັງກະສິກໍາ, ແລະການຕັດສິນໃຈ, ແມ່ນພື້ນທີ່ການຄົ້ນຄວ້າທີ່ມີທ່າແຮງສູງ (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). ໃນເລື່ອງນີ້, IoT, WSNs, ແລະຂໍ້ມູນໃຫຍ່ສະເຫນີຄວາມສາມາດເພີ່ມເຕີມທີ່ຫນ້າສົນໃຈ (van der Merwe et al., 2020). ຄ່າໃຊ້ຈ່າຍໃນການປະຕິບັດ, ການປະຫຍັດຄ່າໃຊ້ຈ່າຍ, ປະສິດທິພາບພະລັງງານ, ແລະຄວາມປອດໄພຂອງຂໍ້ມູນແມ່ນຢູ່ໃນບັນດາຂົງເຂດທີ່ບໍ່ໄດ້ຮັບການຄົ້ນຄວ້າສໍາລັບການເຊື່ອມໂຍງດັ່ງກ່າວ (Masroor et al., 2021).
ປະເທດ ແລະສະຖາບັນການສຶກສາ
ຂັ້ນຕອນສຸດທ້າຍລວມທັງການສືບສວນຂອງປະເທດຕົ້ນກໍາເນີດແລະການກ່ຽວຂ້ອງທາງວິຊາການຂອງຜູ້ຂຽນໄດ້. ໂດຍຜ່ານການວິເຄາະນີ້, ພວກເຮົາມີຈຸດປະສົງເພື່ອໃຫ້ເຂົ້າໃຈດີກວ່າການແຈກຢາຍທາງພູມສາດຂອງນັກວິຊາການທີ່ປະກອບສ່ວນເຂົ້າໃນການນໍາໃຊ້ drones ໃນກະສິກໍາ. ມັນເປັນທີ່ຫນ້າສັງເກດທີ່ຈະສັງເກດເຫັນຄວາມຫຼາກຫຼາຍຂອງປະເທດແລະສະຖາບັນການສຶກສາ. ຈາກທັດສະນະຂອງປະເທດ, ອາເມລິກາ, ຈີນ, ອິນເດຍ, ແລະອີຕາລີຈັດອັນດັບຢູ່ເທິງສຸດຂອງບັນຊີລາຍຊື່ໃນຈໍານວນສິ່ງພິມ (ຕາຕະລາງ 7). ປະຈຸບັນ
ການຄົ້ນຄວ້າກ່ຽວກັບ drones ກະສິກໍາແມ່ນສ່ວນໃຫຍ່ແມ່ນຢູ່ໃນບັນດາປະເທດອາເມລິກາເຫນືອແລະອາຊີ, ສ່ວນໃຫຍ່ແມ່ນຍ້ອນການມີສ່ວນຮ່ວມສູງຂອງພວກເຂົາໃນຄໍາຮ້ອງສະຫມັກກະສິກໍາຄວາມແມ່ນຍໍາ. ຕົວຢ່າງເຊັ່ນ, ໃນສະຫະລັດອາເມລິກາ, ຕະຫຼາດຂອງ drones ກະສິກໍາໄດ້ຖືກຄາດຄະເນຢູ່ທີ່ 841.9 ລ້ານ USD ໃນປີ 2020, ກວມເອົາປະມານ 30% ຂອງສ່ວນແບ່ງຕະຫຼາດທົ່ວໂລກ (ReportLinker, 2021). ຕາມການຄາດຄະເນວ່າ, ຈີນຈະບັນລຸຂະໜາດຕະຫຼາດປະມານ 2.6 ຕື້ USD ໃນປີ 2027. ປະເທດນີ້ພວມຮຽກຮ້ອງໃຫ້ບັນດານັກເຄື່ອນໄຫວກະສິກຳແກ້ໄຂບັນຫາຜະລິດຕະພັນ, ບັນລຸໄດ້ຜົນຜະລິດທີ່ດີກວ່າ, ຫຼຸດຜ່ອນແຮງງານ, ແລະ ແຫຼ່ງຜະລິດຜະລິດໜ້ອຍ. ແນວໃດກໍດີ, ການນຳໃຊ້ເຕັກໂນໂລຊີຂອງຈີນຍັງໄດ້ຮັບການຊຸກຍູ້ໂດຍປັດໄຈເຊັ່ນຂະໜາດປະຊາກອນແລະຄວາມຕ້ອງການປະດິດສ້າງແລະປັບປຸງການຄຸ້ມຄອງການປູກພືດທີ່ມີຢູ່ແລ້ວ.
ອັນດັບຕົ້ນໆຂອງບັນດາປະເທດ ແລະມະຫາວິທະຍາໄລ/ອົງການຈັດຕັ້ງທີ່ປະກອບສ່ວນເຂົ້າໃນການຜະລິດ
ການຄົ້ນຄວ້າກ່ຽວກັບ drone ກະສິກໍາ.
| ອັນດັບ | ບັນດາປະເທດ |
| 1 | ອາເມລິກາ |
| 2 | ຈີນ |
| 3 | ອິນເດຍ |
| 4 | ອິຕາລີ |
| 5 | ສະເປນ |
| 6 | ເຢຍລະມັນ |
| 7 | ປະເທດບຣາຊິນ |
| 8 | ອົດສະຕາລີ |
| 9 | ຍີ່ປຸ່ນ |
| 10 | ສະຫະປະຊາຊະອານາຈັກ |
| ອັນດັບ | ມະຫາວິທະຍາໄລ/ອົງການຈັດຕັ້ງ |
| 1 | ສະພາບັນດິດວິທະຍາສາດຈີນ |
| 2 | ກະຊວງກະສິກຳແຫ່ງສາທາລະນະລັດປະຊາຊົນຈີນ |
| 3 | ສະພາຊັ້ນສູງຂອງການສືບສວນວິທະຍາສາດ |
| 4 | ວິທະຍາໄລ Texas A&M |
| 5 | ຈີນວິທະຍາໄລກະສິກໍາ |
| 6 | ບໍລິການຄົ້ນຄວ້າກະສິ ກຳ USDA |
| 7 | CSIC – Instituto de Agricultura Sostenible IAS |
| 8 | Purdue University |
| 9 | ສະພາຄົ້ນຄ້ວາແຫ່ງຊາດ |
| 10 | ມະຫາວິທະຍາໄລກະເສດສາດພາກໃຕ້ຂອງຈີນ |
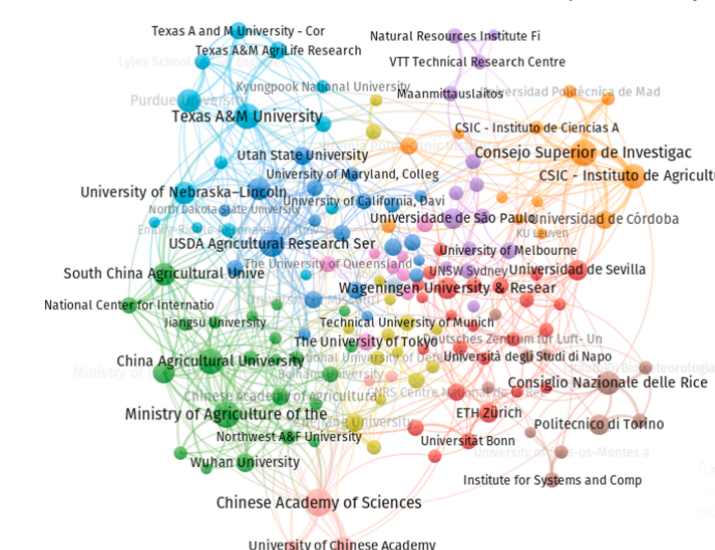
ຈາກທັດສະນະຂອງມະຫາວິທະຍາໄລແລະອົງການຈັດຕັ້ງ, ສະຖາບັນວິທະຍາສາດຈີນເປັນອັນດັບຫນຶ່ງໃນຈໍານວນສິ່ງພິມ, ຕາມດ້ວຍກະຊວງກະສິກໍາຂອງສາທາລະນະລັດປະຊາຊົນຈີນແລະ Consejo Superior de Investigaciones Científicas. ສະຖາບັນວິທະຍາສາດຈີນເປັນຕົວແທນໂດຍຜູ້ຂຽນ Liao Xiaohan ແລະ Li Jun; Han Wenting ຕາງໜ້າໃຫ້ກະຊວງກະສິກຳ ສາທາລະນະລັດ ປະຊາຊົນຈີນ; ແລະ Consejo Superior de Investigaciones Científicas ເປັນຕົວແທນໂດຍ Lopez-Granados, ´ F. ແລະ Pena, ˜ Jos´e María S. ຈາກສະຫະລັດອາເມລິກາ, ມະຫາວິທະຍາໄລເຊັ່ນ Texas A&M University ແລະ Purdue University ຊອກຫາຂອງເຂົາເຈົ້າ.
ກ່າວເຖິງ. ມະຫາວິທະຍາໄລທີ່ມີຈໍານວນສິ່ງພິມສູງສຸດແລະການເຊື່ອມຕໍ່ຂອງພວກເຂົາແມ່ນສະແດງຢູ່ໃນຮູບທີ 4. ນອກຈາກນັ້ນ, ບັນຊີລາຍຊື່ນີ້ປະກອບມີສະຖາບັນເຊັ່ນ Consiglio Nazionale delle Ricerche ແລະ Consejo Superior de Investigaciones Científicas ທີ່ມີການເຄື່ອນໄຫວໃນການຄົ້ນຄວ້າວິທະຍາສາດ, ແຕ່ບໍ່ແມ່ນສະຖາບັນວິຊາການ. .
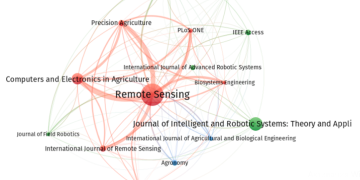
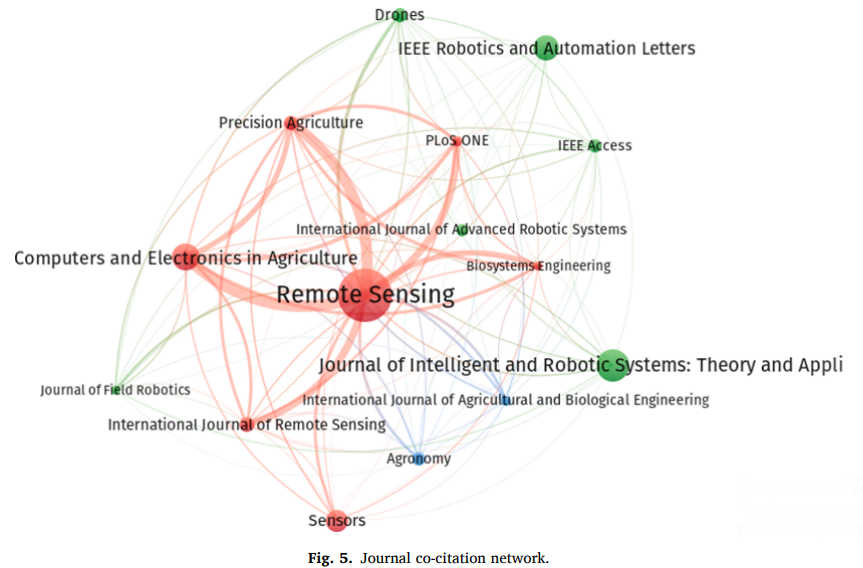
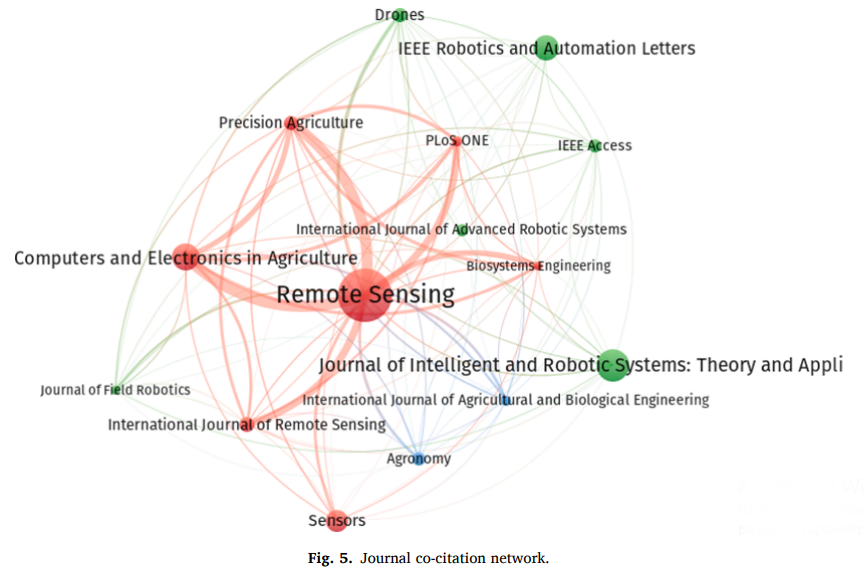
ການຄັດເລືອກຂອງພວກເຮົາປະກອບມີວາລະສານຫຼາກຫຼາຍຊະນິດ, ກວມເອົາເກືອບທັງຫມົດຂອງຂໍ້ມູນທີ່ມີຢູ່. ດັ່ງທີ່ສະແດງຢູ່ໃນຕາຕະລາງ 8, ການຮັບຮູ້ທາງໄກທີ່ມີ 258 ບົດຄວາມຢູ່ໃນອັນດັບເທິງ, ຕິດຕາມມາດ້ວຍວາລະສານຂອງລະບົບອັດສະລິຍະແລະຫຸ່ນຍົນ: ທິດສະດີແລະຄໍາຮ້ອງສະຫມັກທີ່ມີ 126 ແລະຄອມພິວເຕີແລະເອເລັກໂຕຣນິກໃນກະສິກໍາທີ່ມີ 98 ບົດຄວາມ. ໃນຂະນະທີ່ Remote Sensing ສ່ວນໃຫຍ່ແມ່ນສຸມໃສ່ການຄໍາຮ້ອງສະຫມັກແລະການພັດທະນາຂອງ drones, ຄອມພິວເຕີແລະເອເລັກໂຕຣນິກໃນການກະສິກໍາສ່ວນໃຫຍ່ແມ່ນກວມເອົາຄວາມກ້າວຫນ້າໃນຮາດແວຄອມພິວເຕີ, ຊອບແວ, ເອເລັກໂຕຣນິກ, ແລະລະບົບການຄວບຄຸມໃນກະສິກໍາ. ຮ້ານຄ້າຂ້າມພື້ນທີ່, ເຊັ່ນ: IEEE Robotics ແລະ Automation Letters ທີ່ມີ 87 ສິ່ງພິມແລະ IEEE Access ທີ່ມີ 34 ສິ່ງພິມ, ຍັງເປັນຮ້ານອັນດັບຕົ້ນໃນພາກສະຫນາມ. ສິບຫ້າສາຂາໄດ້ປະກອບສ່ວນເຂົ້າໃນວັນນະຄະດີທີ່ມີ 959 ເອກະສານ, ເຊິ່ງກວມເອົາປະມານ 20.40% ຂອງສິ່ງພິມທັງຫມົດ. ການວິເຄາະການອ້າງອີງຮ່ວມຂອງວາລະສານເຮັດໃຫ້ພວກເຮົາກວດສອບຄວາມສໍາຄັນແລະຄວາມຄ້າຍຄືກັນລະຫວ່າງສິ່ງພິມ. ການວິເຄາະ co-citation yields 5 clusters, as display in Fig. XNUMX. ກຸ່ມສີແດງປະກອບດ້ວຍວາລະສານເຊັ່ນ Remote Sensing, Computer and Electronics in Agriculture, Sensors,
ແລະວາລະສານສາກົນຂອງການຮັບຮູ້ທາງໄກ. ຮ້ານຄ້າທັງຫມົດເຫຼົ່ານີ້ແມ່ນວາລະສານທີ່ມີຊື່ສຽງສູງໃນຂົງເຂດການຮັບຮູ້ຫ່າງໄກສອກຫຼີກແລະຄວາມແມ່ນຍໍາຂອງກະສິກໍາ. ກຸ່ມສີຂຽວປະກອບມີວາລະສານທີ່ຈັດການກັບຫຸ່ນຍົນ, ເຊັ່ນ: Journal of Intelligent and Robotic Systems: Theory and Applications, IEEE Robotics and Automation Letters, IEEE Access, ແລະ Drones. ຮ້ານຄ້າເຫຼົ່ານີ້ສ່ວນຫຼາຍແມ່ນພິມເຜີຍແຜ່ເອກະສານກ່ຽວກັບອັດຕະໂນມັດແລະເປັນປະໂຫຍດສໍາລັບວິສະວະກອນກະສິກໍາ. ກຸ່ມສຸດທ້າຍແມ່ນສ້າງຂື້ນໂດຍວາລະສານທີ່ກ່ຽວຂ້ອງກັບການປູກຝັງ ແລະ ວິສະວະກຳກະສິກຳ, ເຊັ່ນ: Agronomy ແລະ International Journal of Agricultural and Biological Engineering.
ວາລະສານອັນດັບ 15 ໃນການຄົ້ນຄວ້າກ່ຽວກັບ drone ກະສິກໍາ.
| ອັນດັບ | ວາລະສານ | Count |
| 1 | ເຊັນເຊີຈາກໄລຍະໄກ | 258 |
| 2 | Journal of Intelligent and Robotic Systems: ທິດສະດີ ແລະ ຄໍາຮ້ອງສະຫມັກ | 126 |
| 3 | ຄອມພິວເຕີແລະເອເລັກໂຕຣນິກໃນການກະສິກໍາ | 98 |
| 4 | IEEE ຫຸ່ນຍົນແລະຕົວອັກສອນອັດຕະໂນມັດ | 87 |
| 5 | Sensors | 73 |
| 6 | International Journal of Remote Sensing | 42 |
| 7 | ການກະເສດທີ່ຖືກຕ້ອງ | 41 |
| 8 | Drones | 40 |
| 9 | ການປູກຝັງ | 34 |
| 10 | ການເຂົ້າເຖິງ IEEE | 34 |
| 11 | ວາລະສານສາກົນຂອງລະບົບຫຸ່ນຍົນຂັ້ນສູງ | 31 |
| 12 | ວາລະສານສາກົນດ້ານວິສະວະກຳກະສິກຳ ແລະ ຊີວະວິທະຍາ | 25 |
| 13 | PLoS ONE | 25 |
| 14 | ວາລະສານຫຸ່ນຍົນພາກສະຫນາມ | 23 |
| 15 | Biosystems Engineering | 23 |
ສະຫຼຸບ
Summary
ໃນການສຶກສານີ້, ພວກເຮົາໄດ້ສະຫຼຸບແລະວິເຄາະການຄົ້ນຄວ້າທີ່ມີຢູ່ແລ້ວກ່ຽວກັບ drones ກະສິກໍາ. ການນໍາໃຊ້ເຕັກນິກ bibliometric ຕ່າງໆ, ພວກເຮົາພະຍາຍາມເພື່ອໃຫ້ໄດ້ຄວາມເຂົ້າໃຈດີຂຶ້ນກ່ຽວກັບໂຄງສ້າງທາງປັນຍາຂອງການຄົ້ນຄວ້າກ່ຽວກັບ drone ກະສິກໍາ. ໂດຍລວມແລ້ວ, ການທົບທວນຄືນຂອງພວກເຮົາສະຫນອງການປະກອບສ່ວນຈໍານວນຫນຶ່ງໂດຍການກໍານົດແລະສົນທະນາຄໍາສໍາຄັນໃນວັນນະຄະດີ, ເປີດເຜີຍກຸ່ມຄວາມຮູ້ໃນຂະນະທີ່ປະກອບເປັນຊຸມຊົນທີ່ຄ້າຍຄືກັນໃນດ້ານຂອງ drones, ອະທິບາຍການຄົ້ນຄວ້າກ່ອນຫນ້ານີ້, ແລະແນະນໍາທິດທາງການຄົ້ນຄວ້າໃນອະນາຄົດ. ຂ້າງລຸ່ມນີ້, ພວກເຮົາອະທິບາຍການຄົ້ນພົບຕົ້ນຕໍຂອງການທົບທວນຄືນກ່ຽວກັບການພັດທະນາ drones ກະສິກໍາ:
• ວັນນະຄະດີໂດຍລວມໄດ້ຂະຫຍາຍຕົວຢ່າງໄວວາ ແລະ ດຶງດູດຄວາມສົນໃຈຢ່າງໃຫຍ່ຫຼວງໃນທົດສະວັດທີ່ຜ່ານມາ, ດັ່ງທີ່ຊີ້ໃຫ້ເຫັນເຖິງການເພີ່ມຂຶ້ນຂອງຈໍານວນບົດຄວາມພາຍຫຼັງປີ 2012. ເຖິງແມ່ນວ່າສາຂາຄວາມຮູ້ນີ້ຍັງບໍ່ທັນບັນລຸໄດ້ຢ່າງເຕັມທີ່ (Barrientos et al., 2011; Maes & Steppe, 2019), ຄໍາຖາມຈໍານວນຫນຶ່ງແມ່ນຍັງບໍ່ມີຄໍາຕອບ. ຕົວຢ່າງ, ຜົນປະໂຫຍດຂອງ drones ໃນການປູກຝັງໃນເຮືອນຍັງເປີດສໍາລັບການໂຕ້ວາທີ (Aslan et al., 2022; Krul et al., 2021; Rold' an et al., 2015). ຄວາມຊັບຊ້ອນຂອງສາກທົ່ງນາ ແລະສະຖານະການພາບທີ່ແຕກຕ່າງ (ເຊັ່ນ: ເງົາ ແລະ ການສ່ອງແສງ) ສາມາດສົ່ງຜົນໃຫ້ຄວາມແຕກຕ່າງກັນໃນຊັ້ນຮຽນມີສະເປັກສູງກວ່າ (Yao et al., 2019). ເຖິງແມ່ນວ່າໃນໄລຍະການຄົ້ນຄວ້າຕໍ່ມາ, ນັກຄົ້ນຄວ້າໄດ້ຖືກທ້າທາຍໃນການກໍານົດແຜນການການບິນທີ່ດີທີ່ສຸດຕາມສະຖານະການສະເພາະແລະຄຸນນະພາບຮູບພາບທີ່ຕ້ອງການ (Soares et al., 2021; Tu et al.,
2020).
•ພວກເຮົາສັງເກດເຫັນວ່າພາກສະຫນາມໄດ້ກ້າວຫນ້າຈາກການພັດທະນາລະບົບ UAV ທີ່ມີປະສິດທິພາບໃນການລວມເອົາເຕັກນິກ AI ເຊັ່ນການຮຽນຮູ້ເຄື່ອງຈັກແລະການຮຽນຮູ້ເລິກເຊິ່ງໃນການອອກແບບ drones ກະສິກໍາ (Bah et al., 2018; Kitano et al., 2019; Maimaitijiang et al. , 2020; Mazzia et al., 2020; Tetila et al., 2020).
• ການຄົ້ນຄວ້າກ່ຽວກັບ drones ກະສິກໍາສ່ວນໃຫຍ່ສົນທະນາການຮັບຮູ້ຫ່າງໄກສອກຫຼີກໂດຍການຂຸດຄົ້ນທ່າແຮງຂອງເຕັກໂນໂລຢີໃນການຕິດຕາມສິ່ງແວດລ້ອມ, ການຄຸ້ມຄອງພືດ, ແລະການຄຸ້ມຄອງຫຍ້າ (ກຸ່ມ 1) ເຊັ່ນດຽວກັນກັບ phenotyping ຫ່າງໄກສອກຫຼີກແລະການຄາດຄະເນຜົນຜະລິດ (ກຸ່ມ 2). ຊຸດຂອງການສຶກສາທີ່ມີອິດທິພົນກ່ຽວກັບ drones ກະສິກໍາປະກອບມີ Austin (2010), Berni et al. (2009)a, Herwitz et al. (2004), Nex and Remondino (2014), ແລະ Zhang and Kovacs (2012). ການສຶກສາເຫຼົ່ານີ້ໄດ້ພັດທະນາພື້ນຖານແນວຄວາມຄິດຂອງການຄົ້ນຄວ້າທີ່ກ່ຽວຂ້ອງກັບ drone ໃນສະພາບການກະສິກໍາ.
• ກ່ຽວຂ້ອງກັບວິທີການ, ພວກເຮົາສັງເກດເຫັນວ່າການຄົ້ນຄວ້າສ່ວນໃຫຍ່ທີ່ເຮັດມາເຖິງຕອນນັ້ນແມ່ນປະກອບດ້ວຍທັງການອອກແບບລະບົບ, ແນວຄວາມຄິດ, ຫຼືການສຶກສາທີ່ອີງໃສ່ການທົບທວນຄືນ (Inoue, 2020; Nex & Remondino, 2014; P'erez-Ortiz et al. , 2015; Yao et al., 2019). ພວກເຮົາຍັງສັງເກດເຫັນການຂາດວິທີການສຶກສາແບບເຫັນປະຈັກ, ຄຸນນະພາບ, ແລະກໍລະນີທີ່ເຮັດວຽກຢູ່ໃນການສືບສວນ drones ກະສິກໍາ.
•ບໍ່ດົນມານີ້, ຫົວຂໍ້ທີ່ກ່ຽວຂ້ອງກັບການກະສິກໍາຄວາມແມ່ນຍໍາ, ເຕັກນິກ AI, ຄວາມແມ່ນຍໍາ viticulture, ແລະການປະເມີນຄວາມກົດດັນນ້ໍາໄດ້ດຶງດູດຄວາມສົນໃຈຢ່າງຫຼວງຫຼາຍ (Espinoza et al., 2017; Gomez-Cand ´on ´ et al., 2016; Matese et al., 2015; Matese & Di Gennaro, 2018, 2021; Z. Zhou et al., 2021). ການກວດສອບຢ່າງລະມັດລະວັງຂອງກຸ່ມການຄົ້ນຄວ້າໃນສອງຍຸກແຍກຕ່າງຫາກ, 1990-2010 ແລະ 2011-2021, ສະແດງໃຫ້ເຫັນຄວາມກ້າວຫນ້າຂອງໂຄງສ້າງທາງປັນຍາຂອງໂດເມນ. ໄລຍະແຕ່ປີ 1990 ຫາປີ 2010 ໄດ້ສ້າງແນວຄວາມຄິດສູນກາງ ແລະ ແນວຄວາມຄິດຂອງ drones, ເຊິ່ງເຫັນໄດ້ຊັດເຈນຈາກການສົນທະນາກ່ຽວກັບການອອກແບບ, ການພັດທະນາ ແລະ ການຈັດຕັ້ງປະຕິບັດ UAV. ໃນຍຸກທີສອງ, ການຄົ້ນຄວ້າສຸມໃສ່ການສຶກສາກ່ອນຫນ້າ, ຄວາມພະຍາຍາມເພື່ອສັງເຄາະກໍລະນີການນໍາໃຊ້ UAV ໃນກະສິກໍາ. ພວກເຮົາຍັງໄດ້ພົບເຫັນການສຶກສາຈໍານວນຫຼາຍທີ່ປຶກສາຫາລືການນໍາໃຊ້ drone ໃນວຽກງານການຖ່າຍຮູບແລະການກະສິກໍາຄວາມແມ່ນຍໍາ.
| ອັນດັບ | ວາລະສານ | Count |
| 1 | ເຊັນເຊີຈາກໄລຍະໄກ | 258 |
| 2 | Journal of Intelligent and Robotic Systems: ທິດສະດີ ແລະ | 126 |
| ຄໍາຮ້ອງສະຫມັກ | ||
| 3 | ຄອມພິວເຕີແລະເອເລັກໂຕຣນິກໃນການກະສິກໍາ | 98 |
| 4 | IEEE ຫຸ່ນຍົນແລະຕົວອັກສອນອັດຕະໂນມັດ | 87 |
| 5 | Sensors | 73 |
| 6 | International Journal of Remote Sensing | 42 |
| 7 | ການກະເສດທີ່ຖືກຕ້ອງ | 41 |
| 8 | Drones | 40 |
| 9 | ການປູກຝັງ | 34 |
| 10 | ການເຂົ້າເຖິງ IEEE | 34 |
| 11 | ວາລະສານສາກົນຂອງລະບົບຫຸ່ນຍົນຂັ້ນສູງ | 31 |
| 12 | ວາລະສານສາກົນດ້ານວິສະວະກຳກະສິກຳ ແລະ ຊີວະວິທະຍາ | 25 |
| 13 | PLoS ONE | 25 |
| 14 | ວາລະສານຫຸ່ນຍົນພາກສະຫນາມ | 23 |
| 15 | Biosystems Engineering | 22 |
ຜົນກະທົບ
ການທົບທວນ bibliometric ຂອງພວກເຮົາໄດ້ຖືກອອກແບບແລະດໍາເນີນການກັບນັກວິຊາການ, ຊາວກະສິກອນ, ຜູ້ຊ່ຽວຊານດ້ານກະສິກໍາ, ທີ່ປຶກສາດ້ານການປູກພືດ, ແລະຜູ້ອອກແບບລະບົບ UAV. ສໍາລັບຄວາມຮູ້ທີ່ດີທີ່ສຸດຂອງຜູ້ຂຽນ, ນີ້ແມ່ນຫນຶ່ງໃນການທົບທວນຄືນຕົ້ນສະບັບທໍາອິດທີ່ໄດ້ປະຕິບັດການວິເຄາະໃນຄວາມເລິກ bibliometric ຂອງ.
ຄໍາຮ້ອງສະຫມັກ drone ໃນກະສິກໍາ. ພວກເຮົາໄດ້ດໍາເນີນການທົບທວນທີ່ສົມບູນແບບຂອງອົງການຄວາມຮູ້ນີ້, ນໍາໃຊ້ການວິເຄາະການອ້າງອິງແລະການອ້າງອີງຮ່ວມກັນຂອງສິ່ງພິມ. ຄວາມພະຍາຍາມຂອງພວກເຮົາເພື່ອອະທິບາຍໂຄງສ້າງທາງປັນຍາຂອງການຄົ້ນຄວ້າ drone ຍັງສະເຫນີຄວາມເຂົ້າໃຈໃຫມ່ສໍາລັບນັກວິຊາການ. ການທົບທວນຄືນຢ່າງລະມັດລະວັງຂອງຄໍາທີ່ໃຊ້ໃນໄລຍະເວລາສະແດງໃຫ້ເຫັນຈຸດເດັ່ນແລະພື້ນທີ່ການຄົ້ນຄວ້າຈຸດສຸມໃນວັນນະຄະດີທີ່ກ່ຽວຂ້ອງກັບ drone. ນອກຈາກນັ້ນ, ພວກເຮົາສະເຫນີບັນຊີລາຍຊື່ຂອງການສຶກສາທີ່ອ້າງອີງຫຼາຍທີ່ສຸດເພື່ອກໍານົດວຽກງານການຄົ້ນຄວ້າທີ່ມີຜົນກະທົບທີ່ສຸດທີ່ສໍາເລັດໃນພາກສະຫນາມ. ການກໍານົດບົດຄວາມແລະຄໍາສໍາຄັນສາມາດສະຫນອງຈຸດເລີ່ມຕົ້ນທີ່ຫນັກແຫນ້ນເພື່ອຄົ້ນພົບຊ່ອງທາງຕ່າງໆສໍາລັບການສຶກສາໃນອະນາຄົດ.
ສິ່ງສໍາຄັນ, ພວກເຮົາໄດ້ເປີດເຜີຍກຸ່ມທີ່ຈັດປະເພດວຽກງານທີ່ສົມທຽບກັນແລະລາຍລະອຽດກ່ຽວກັບຜົນໄດ້ຮັບ. ການສຶກສາທີ່ຈັດຢູ່ໃນກຸ່ມຊ່ວຍໃນການເຂົ້າໃຈໂຄງສ້າງທາງປັນຍາຂອງການຄົ້ນຄວ້າ UAV. ໂດຍສະເພາະ, ພວກເຮົາຄົ້ນພົບການຂາດແຄນຂອງການສຶກສາທີ່ສືບສວນປັດໃຈການຮັບຮອງເອົາຂອງ drones
ແລະສິ່ງກີດຂວາງໃນກິດຈະກໍາການປູກຝັງ (ເບິ່ງຕາຕະລາງ 9). ນັກຄົ້ນຄວ້າໃນອະນາຄົດສາມາດແກ້ໄຂຊ່ອງຫວ່າງທີ່ອາດຈະເກີດຂື້ນໂດຍການດໍາເນີນການສືບສວນທາງດ້ານປະຈັກພະຍານທີ່ປະເມີນປັດໃຈການຮັບຮອງເອົາຂອງ drones ໃນກິດຈະກໍາກະສິກໍາທີ່ແຕກຕ່າງກັນແລະສະພາບອາກາດ. ນອກຈາກນັ້ນ, ການສຶກສາກໍລະນີສຶກສາກ່ຽວກັບປະສິດທິພາບຂອງ drones ຄວນໄດ້ຮັບການສະຫນັບສະຫນູນຂໍ້ມູນທີ່ແທ້ຈິງຈາກພາກສະຫນາມ. ນອກຈາກນັ້ນ, ການມີສ່ວນຮ່ວມຂອງຊາວກະສິກອນແລະຜູ້ຈັດການໃນການຄົ້ນຄວ້າທາງວິຊາການຈະເປັນປະໂຫຍດສໍາລັບຄວາມກ້າວຫນ້າທາງດ້ານທິດສະດີແລະການປະຕິບັດຂອງການຄົ້ນຄວ້າ drone. ພວກເຮົາຍັງສາມາດກໍານົດນັກຄົ້ນຄວ້າທີ່ໂດດເດັ່ນທີ່ສຸດແລະການປະກອບສ່ວນຂອງພວກເຂົາ, ເຊິ່ງມີຄ່າເພາະວ່າຄວາມຮັບຮູ້ຂອງວຽກງານການສອນທີ່ຜ່ານມາສາມາດສະເຫນີຄໍາແນະນໍາບາງຢ່າງສໍາລັບຄວາມພະຍາຍາມທາງວິຊາການໃນອະນາຄົດ.
ຕາລາງ 9
ອຸປະສັກໃນການຮັບຮອງເອົາ UAV.
| ອຸປະສັກ | ລາຍລະອຽດ |
| ຂໍ້ມູນຄວາມປອດໄພ | ຄວາມປອດໄພທາງອິນເຕີເນັດເປັນສິ່ງທ້າທາຍທີ່ສໍາຄັນສໍາລັບການປະຕິບັດ ວິທີແກ້ໄຂ IoT (Masroor et al., 2021). |
| ຄວາມສາມາດເຮັດວຽກຮ່ວມກັນແລະ ການເຊື່ອມໂຍງ | ເຕັກໂນໂລຊີຕ່າງໆເຊັ່ນ UAV, WSN, IoT, ແລະອື່ນໆ. ຄວນໄດ້ຮັບການປະສົມປະສານແລະສົ່ງຂໍ້ມູນເຊິ່ງ ເພີ່ມລະດັບຄວາມຊັບຊ້ອນ (Alsamhi et al., 2021; Popescu et al., 2020; Vuran et al., 2018). |
| ຄ່າໃຊ້ຈ່າຍໃນການປະຕິບັດ | ນີ້ແມ່ນກໍລະນີໂດຍສະເພາະສໍາລັບຊາວກະສິກອນຂະຫນາດນ້ອຍແລະສໍາລັບ ການເຊື່ອມໂຍງເຕັກໂນໂລຊີທີ່ທັນສະໄຫມຕ່າງໆ ( Masroor et al., 2021). |
| ຄວາມຮູ້ດ້ານແຮງງານ ແລະ ຄວາມຊ່ຽວຊານ | ນັກບິນ drone ທີ່ມີຄວາມຊໍານິຊໍານານແມ່ນຈໍາເປັນເພື່ອດໍາເນີນການ UAVs. ພ້ອມກັນນັ້ນ, ຍັງໄດ້ດຳເນີນການເຄື່ອນໄຫວຕ່າງໆຢ່າງທັນການ ເຕັກໂນໂລຊີຮຽກຮ້ອງໃຫ້ຄົນງານທີ່ມີສີມື (YB Huang et al., 2013; Tsouros et al., 2019). |
| ພະລັງງານເຄື່ອງຈັກແລະການບິນ ໄລຍະເວລາ | Drones ບໍ່ສາມາດດໍາເນີນການສໍາລັບຊົ່ວໂມງແລະການປົກຫຸ້ມຂອງ ພື້ນທີ່ຂະຫນາດໃຫຍ່ (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| ຄວາມຫມັ້ນຄົງ, ຄວາມຫນ້າເຊື່ອຖື, ແລະ ຄວາມຄ່ອງແຄ້ວ | Drones ບໍ່ຫມັ້ນຄົງໃນລະຫວ່າງສະພາບອາກາດທີ່ບໍ່ດີ (Hardin & Hardin, 2010; Laliberte et al., 2007). |
| ຂໍ້ຈໍາກັດ payload ແລະ ຄຸນະພາບຂອງເຊັນເຊີ | Drones ພຽງແຕ່ສາມາດປະຕິບັດການໂຫຼດຈໍາກັດນໍາໄປສູ່ການ ຄວາມສາມາດໃນການໂຫຼດເຊັນເຊີທີ່ມີຄຸນນະພາບຕ່ໍາ (Nebiker et al., 2008). |
| ລະບຽບການ | ເນື່ອງຈາກ drones ສາມາດເປັນອັນຕະລາຍເຊັ່ນດຽວກັນ, ມີຮ້າຍແຮງ ກົດລະບຽບໃນບາງຂົງເຂດ (Hardin & Jensen, 2011; Laliberte & Rango, 2011). |
| ຄວາມຮູ້ຂອງຊາວກະສິກອນ ແລະ ຄວາມສົນໃຈ | ດັ່ງທີ່ເຕັກໂນໂລຊີທີ່ທັນສະໄຫມອື່ນໆ, drones ໄດ້ ການປະຕິບັດສົບຜົນສໍາເລັດຕ້ອງການຄວາມຊໍານານແລະຍັງ ພ້ອມກັບຄວາມບໍ່ແນ່ນອນ (Fisher et al., 2009; Lambert et al., 2004; Stafford, 2000). |
ເນື່ອງຈາກມີຄວາມຕ້ອງການທີ່ຈະນໍາໃຊ້ຊັບພະຍາກອນທີ່ມີຢູ່ຢ່າງມີປະສິດທິພາບເພື່ອໃຫ້ຜົນຜະລິດສູງສຸດ, ຊາວກະສິກອນສາມາດໃຊ້ປະໂຫຍດຈາກ drones ເພື່ອຮັບປະກັນການສະແກນທີ່ໄວ, ຖືກຕ້ອງ, ແລະປະຫຍັດຕົ້ນທຶນໃນພື້ນທີ່ຂອງພວກເຂົາ. ເຕັກໂນໂລຊີສາມາດສະຫນັບສະຫນູນຊາວກະສິກອນໃນການກໍານົດສະພາບການປູກພືດຂອງເຂົາເຈົ້າແລະປະເມີນສະຖານະຂອງນ້ໍາ, ຂັ້ນຕອນຂອງການສຸກແລ້ວ, ການລະບາດຂອງແມງໄມ້, ແລະຄວາມຕ້ອງການດ້ານໂພຊະນາການ. ຄວາມສາມາດໃນການຮັບຮູ້ທາງໄກຂອງ drones ສາມາດໃຫ້ຂໍ້ມູນທີ່ສໍາຄັນຂອງຊາວກະສິກອນເພື່ອຄາດການບັນຫາຢູ່ໃນຂັ້ນຕອນຕົ້ນແລະເຮັດການແຊກແຊງທີ່ເຫມາະສົມໃນທັນທີ. ຢ່າງໃດກໍ່ຕາມ, ຜົນປະໂຫຍດຂອງເຕັກໂນໂລຢີສາມາດຮັບຮູ້ໄດ້ພຽງແຕ່ຖ້າສິ່ງທ້າທາຍຖືກແກ້ໄຂຢ່າງຖືກຕ້ອງ. ໃນຄວາມສະຫວ່າງຂອງ
ບັນຫາໃນປະຈຸບັນກ່ຽວກັບຄວາມປອດໄພຂອງຂໍ້ມູນ, ບັນຫາເຕັກໂນໂລຢີເຊັນເຊີ (ຕົວຢ່າງ, ຄວາມຫນ້າເຊື່ອຖືຫຼືຄວາມຖືກຕ້ອງຂອງການວັດແທກ), ຄວາມຊັບຊ້ອນຂອງການເຊື່ອມໂຍງ, ແລະຄ່າໃຊ້ຈ່າຍໃນການປະຕິບັດຢ່າງຫຼວງຫຼາຍ, ການສຶກສາໃນອະນາຄົດຍັງຕ້ອງກວດເບິ່ງຄວາມເປັນໄປໄດ້ທາງດ້ານເຕັກນິກ, ເສດຖະກິດ, ແລະການດໍາເນີນງານຂອງການເຊື່ອມໂຍງ drones ກະສິກໍາແລະການຕັດອື່ນໆ. ເຕັກໂນໂລຊີຂອບ.
ຂໍ້ຈໍາກັດ
ການສຶກສາຂອງພວກເຮົາມີຂໍ້ຈໍາກັດຫຼາຍຢ່າງ. ກ່ອນອື່ນ ໝົດ, ການຄົ້ນພົບແມ່ນ ກຳ ນົດໂດຍສິ່ງພິມທີ່ເລືອກ ສຳ ລັບການວິເຄາະຂັ້ນສຸດທ້າຍ. ມັນເປັນສິ່ງທ້າທາຍທີ່ຈະເກັບກໍາການສຶກສາທີ່ກ່ຽວຂ້ອງທັງຫມົດທີ່ກ່ຽວຂ້ອງກັບ drones ກະສິກໍາ, ໂດຍສະເພາະທີ່ບໍ່ໄດ້ດັດສະນີໃນຖານຂໍ້ມູນ Scopus. ນອກຈາກນັ້ນ, ຂະບວນການເກັບກໍາຂໍ້ມູນແມ່ນຈໍາກັດພຽງແຕ່ການຕັ້ງຄ່າຄໍາຄົ້ນຫາ, ເຊິ່ງອາດຈະບໍ່ລວມເອົາແລະນໍາໄປສູ່ການຄົ້ນພົບທີ່ບໍ່ສະຫຼຸບ. ດັ່ງນັ້ນ, ການສຶກສາໃນອະນາຄົດຈໍາເປັນຕ້ອງໄດ້ເອົາໃຈໃສ່ຫຼາຍຕໍ່ກັບບັນຫາພື້ນຖານຂອງການເກັບກໍາຂໍ້ມູນເພື່ອເຮັດໃຫ້
ບົດສະຫຼຸບທີ່ເຊື່ອຖືໄດ້ຫຼາຍຂຶ້ນ. ຂໍ້ ຈຳ ກັດອີກຢ່າງ ໜຶ່ງ ແມ່ນກ່ຽວຂ້ອງກັບສິ່ງພິມ ໃໝ່ ທີ່ມີ ຈຳ ນວນການອ້າງອີງຕໍ່າ. ການວິເຄາະ bibliometric ແມ່ນມີຄວາມລໍາອຽງຕໍ່ການພິມເຜີຍແຜ່ກ່ອນຫນ້ານີ້ຍ້ອນວ່າພວກເຂົາມັກຈະໄດ້ຮັບການອ້າງອີງຫຼາຍປີ. ການສຶກສາທີ່ຜ່ານມາຕ້ອງການເວລາທີ່ແນ່ນອນເພື່ອດຶງດູດຄວາມສົນໃຈ ແລະສະສົມການອ້າງອີງ. ດັ່ງນັ້ນ, ການສຶກສາທີ່ຜ່ານມາທີ່ນໍາເອົາການປ່ຽນແປງແບບແຜນຈະບໍ່ໄດ້ຈັດອັນດັບໃນສິບວຽກງານທີ່ມີອິດທິພົນສູງສຸດ. ຂໍ້ຈໍາກັດນີ້ແມ່ນແຜ່ຫຼາຍໃນການກວດສອບໂດເມນການຄົ້ນຄວ້າທີ່ພົ້ນເດັ່ນຂື້ນຢ່າງໄວວາເຊັ່ນ drones ກະສິກໍາ. ດັ່ງທີ່ພວກເຮົາໄດ້ປຶກສາຫາລືກັບ Scopus ເພື່ອສຶກສາວັນນະຄະດີສໍາລັບວຽກງານນີ້, ນັກຄົ້ນຄວ້າໃນອະນາຄົດສາມາດພິຈາລະນາທີ່ແຕກຕ່າງກັນ
ຖານຂໍ້ມູນ, ເຊັ່ນເວັບຂອງວິທະຍາສາດແລະ IEEE Xplore, ເພື່ອຂະຫຍາຍຂອບເຂດແລະເສີມຂະຫຍາຍໂຄງສ້າງການຄົ້ນຄວ້າ.
ການສຶກສາ bibliometric ທີ່ມີທ່າແຮງອາດຈະພິຈາລະນາແຫຼ່ງຄວາມຮູ້ທີ່ສໍາຄັນອື່ນໆເຊັ່ນເອກະສານກອງປະຊຸມ, ບົດ, ແລະປຶ້ມເພື່ອສ້າງຄວາມເຂົ້າໃຈໃຫມ່. ເຖິງວ່າຈະມີການສ້າງແຜນທີ່ແລະການສືບສວນສິ່ງພິມທົ່ວໂລກກ່ຽວກັບ drones ກະສິກໍາ, ການຄົ້ນພົບຂອງພວກເຮົາບໍ່ໄດ້ເປີດເຜີຍເຫດຜົນທີ່ຢູ່ເບື້ອງຫລັງຜົນໄດ້ຮັບທາງວິຊາການຂອງມະຫາວິທະຍາໄລ. ນີ້ເປັນການປູທາງໄປສູ່ພື້ນທີ່ການຄົ້ນຄວ້າໃຫມ່ໃນການອະທິບາຍຄຸນນະພາບວ່າເປັນຫຍັງບາງມະຫາວິທະຍາໄລຈຶ່ງມີຜົນຜະລິດຫຼາຍກ່ວາບ່ອນອື່ນເມື່ອເວົ້າເຖິງການຄົ້ນຄວ້າກະສິກໍາ.
drones. ນອກຈາກນັ້ນ, ການສຶກສາໃນອະນາຄົດສາມາດໃຫ້ຄວາມເຂົ້າໃຈກ່ຽວກັບທ່າແຮງຂອງ drones ເພື່ອເພີ່ມຄວາມຍືນຍົງຂອງການປູກຝັງໃນຫຼາຍວິທີເຊັ່ນ: ການຕິດຕາມສິ່ງແວດລ້ອມ, ການຄຸ້ມຄອງການປູກພືດ, ແລະການສ້າງແຜນທີ່ວັດສະພືດຕາມທີ່ໄດ້ລະບຸໄວ້ໂດຍນັກຄົ້ນຄວ້າຈໍານວນຫນຶ່ງ (Chamuah & Singh, 2019; Islam et al., 2021; Popescu et al., 2020; J. Su, Liu, et al., 2018b). ເນື່ອງຈາກການວິເຄາະຂໍ້ຄວາມບໍ່ເປັນໄປໄດ້ເນື່ອງຈາກມີຈໍານວນເອກະສານທີ່ເລືອກຫຼາຍ, ມັນຈໍາເປັນຕ້ອງມີການທົບທວນຄືນວັນນະຄະດີທີ່ເປັນລະບົບເພື່ອກວດກາເບິ່ງ.
ວິທີການຄົ້ນຄ້ວາທີ່ໃຊ້ແລະການມີສ່ວນຮ່ວມຂອງຊາວກະສິກອນໃນການສຶກສາກ່ອນ. ໃນສັ້ນ, ການວິເຄາະຂອງພວກເຮົາກ່ຽວກັບການຄົ້ນຄວ້າ drone ເປີດເຜີຍການເຊື່ອມຕໍ່ທີ່ເບິ່ງບໍ່ເຫັນຂອງຮ່າງກາຍຄວາມຮູ້ນີ້. ການທົບທວນຄືນນີ້ຈຶ່ງຊ່ວຍເປີດເຜີຍຄວາມສໍາພັນລະຫວ່າງສິ່ງພິມແລະຄົ້ນຫາໂຄງສ້າງທາງປັນຍາຂອງຂະແຫນງການຄົ້ນຄວ້າ. ມັນຍັງພັນລະນາເຖິງການເຊື່ອມໂຍງລະຫວ່າງລັກສະນະຕ່າງໆຂອງວັນນະຄະດີເຊັ່ນ: ຄໍາສໍາຄັນຂອງຜູ້ຂຽນ, ຄວາມກ່ຽວຂ້ອງ, ແລະປະເທດຕ່າງໆ.
ຖະແຫຼງການຄວາມສົນໃຈດ້ານການແຂ່ງຂັນ
ຜູ້ຂຽນປະກາດວ່າພວກເຂົາບໍ່ຮູ້ຜົນປະໂຫຍດທາງການເງິນທີ່ມີການແຂ່ງຂັນຫລືຄວາມ ສຳ ພັນສ່ວນຕົວທີ່ອາດຈະປະກົດມີອິດທິພົນຕໍ່ວຽກງານທີ່ໄດ້ລາຍງານໃນເອກະສານສະບັບນີ້.
ເອກະສານຊ້ອນ 1
TITLE-ABS-KEY ((( drone* OR “ຍານຍົນບໍ່ມີຄົນຂັບ” OR uav* OR “ລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ” ຫຼື ທີ່ ຫຼື “ເຮືອບິນທົດລອງໄລຍະໄກ”) ແລະ (ກະເສດ ຫຼື ກະສິກຳ ຫຼື ກະສິກຳ ຫຼື ຊາວນາ))) ແລະ (ຍົກເວັ້ນ (PUBYEAR, 2022))) ແລະ (ຈຳກັດໃຫ້ (ພາສາ, “ພາສາອັງກິດ”)).
ເອກະສານ
Aasen, H., Burkart, A., Bolten, A., Bareth, G., 2015. ການສ້າງຂໍ້ມູນ 3D hyperspectral ດ້ວຍກ້ອງຖ່າຍພາບ UAV ທີ່ມີນ້ຳໜັກເບົາສຳລັບການຕິດຕາມພືດພັນ: ຈາກ
ການປັບທຽບກ້ອງຖ່າຍຮູບກັບການຮັບປະກັນຄຸນນະພາບ. ISPRS J. Photogramm. ຄວາມຮູ້ສຶກທາງໄກ 108, 245–259. https://doi.org/10.1016/j.isprsjprs.2015.08.002.
Abd-Elrahman, A., Pearlstine, L., Percival, F., 2005. ການພັດທະນາລະບົບການຮັບຮູ້ແບບແຜນສຳລັບການກວດຈັບນົກແບບອັດຕະໂນມັດຈາກຮູບພາບຂອງຍານຍົນທີ່ບໍ່ມີຄົນຂັບ.
ການສໍາຫຼວດ. ແຈ້ງທີ່ດິນ. ວິທະຍາສາດ. 65 (1), 37–45.
Abdollahi, A., Rejeb, K., Rejeb, A., Mostafa, MM, Zailani, S., 2021. ເຄືອຂ່າຍເຊັນເຊີໄຮ້ສາຍໃນການກະສິກໍາ: ຄວາມເຂົ້າໃຈຈາກການວິເຄາະ bibliometric. ຄວາມຍືນຍົງ 13 (21),
12011.
Aboutalebi, M., Torres-Rua, AF, Kustas, WP, Nieto, H., Coopmans, C., McKee, M., ການປະເມີນວິທີການຕ່າງໆສຳລັບການກວດຫາເງົາໃນພາບແສງຄວາມລະອຽດສູງ ແລະ ການປະເມີນຜົນກະທົບຂອງເງົາໃນການຄຳນວນ. ຂອງ NDVI, ແລະ evapotranspiration. ຊົນລະປະທານ. ວິທະຍາສາດ. 37 (3), 407–429. https://doi.org/10.1007/s00271-018-0613-9.
Adao, ˜ T., Hruˇska, J., Padua, ´ L., Bessa, J., Peres, E., Morais, R., Sousa, JJ, 2017. ການຖ່າຍຮູບ Hyperspectral: ການທົບທວນຄືນກ່ຽວກັບເຊັນເຊີ UAV, ຂໍ້ມູນ ການປຸງແຕ່ງແລະ
ຄໍາຮ້ອງສະຫມັກສໍາລັບການກະສິກໍາແລະປ່າໄມ້. ການຮັບຮູ້ທາງໄກ 9 (11). https://doi.org/ 10.3390/rs9111110.
Agüera Vega, F., Ramírez, FC, Saiz, MP, Rosúa, FO, 2015. ການຖ່າຍຮູບຫຼາຍຊົ່ວໄລຍະໂດຍໃຊ້ພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບເພື່ອຕິດຕາມການປູກພືດດອກຕາເວັນ. ຊີວະວິທະຍາ. ອັງ.
132, 19–27. https://doi.org/10.1016/j.biosystemseng.2015.01.008.
Ajayi, OG, Salubi, AA, Angbas, AF, Odigure, MG, 2017. ການສ້າງແບບຈໍາລອງການຍົກລະດັບດິຈິຕອລທີ່ຖືກຕ້ອງຈາກ UAV ໄດ້ຮັບຮູບພາບທີ່ທັບຊ້ອນກັນໃນອັດຕາສ່ວນຕໍ່າ. int.
J. Remote Sens. 38 (8–10), 3113–3134. https://doi.org/10.1080/ 01431161.2017.1285085.
Ali, I., Greifeneder, F., Stamenkovic, J., Neumann, M., Notarnicola, C., 2015. ການທົບທວນຄືນວິທີການຮຽນຮູ້ເຄື່ອງຈັກສໍາລັບຊີວະມວນແລະຄວາມຊຸ່ມຊື່ນຂອງດິນຈາກຂໍ້ມູນການຮັບຮູ້ທາງໄກ. ການຮັບຮູ້ທາງໄກ 7 (12), 16398–16421.
Alsamhi, SH, Afghah, F., Sahal, R., Hawbani, A., Al-qaness, MAA, Lee, B., Guizani, M., ອິນເຕີເນັດສີຂຽວຂອງສິ່ງຕ່າງໆໂດຍໃຊ້ UAVs ໃນເຄືອຂ່າຍ B5G: ການທົບທວນຄືນຄໍາຮ້ອງສະຫມັກ
ແລະຍຸດທະສາດ. ໂຄສະນາ. ຮຄ. ເນັດ. 117, 102505 https://doi.org/10.1016/j. adhoc.2021.102505.
Al-Thani, N., Albuainain, A., Alnaimi, F., Zorba, N., 2020. Drones ສໍາລັບການຕິດຕາມການລ້ຽງແກະ. ໃນ: 20th IEEE Mediterranean Electrotechnical ກອງປະຊຸມ. https://doi.
org/10.1109/MELECON48756.2020.9140588.
Ampatzidis, Y., Partel, V., 2019. UAV-based high throughput phenotyping in citrus using multispectral imaging and artificial intelligence . Remote Sensing 11 (4), https://doi.org/10.3390/rs11040410.
Ampatzidis, Y., Partel, V., Costa, L., 2020. Agroview: ແອັບພລິເຄຊັນທີ່ອີງໃສ່ຄລາວເພື່ອປະມວນຜົນ, ວິເຄາະ ແລະສະແດງພາບຂໍ້ມູນ UAV ທີ່ເກັບກຳມາສຳລັບການນຳໃຊ້ກະສິກຳທີ່ຊັດເຈນໂດຍນຳໃຊ້ປັນຍາປະດິດ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 174, 105457 https://doi. org/10.1016/j.compag.2020.105457.
Ang, K.-L.-M., Seng, JKP, 2021. ຂໍ້ມູນໃຫຍ່ ແລະການຮຽນຮູ້ເຄື່ອງຈັກກັບຂໍ້ມູນ hyperspectral ໃນກະສິກຳ. IEEE Access 9, 36699–36718. https://doi.org/10.1109/
ACCESS.2021.3051196.
Aquilani, C., Confessore, A., Bozzi, R., Sirtori, F., Pugliese, C., 2022. ການທົບທວນຄືນ: ເຕັກນິກການລ້ຽງສັດທີ່ມີຄວາມແມ່ນຍໍາໃນລະບົບການລ້ຽງສັດຕາມທົ່ງຫຍ້າ. ສັດ 16 (1), https://doi.org/10.1016/j.animal.2021.100429.
Armenta-Medina, D., Ramirez-Delreal, TA, Villanueva-Vasquez, ´ D., Mejia-Aguirre, C., ແນວໂນ້ມຂອງເຕັກໂນໂລຊີຂໍ້ມູນຂ່າວສານ ແລະການສື່ສານທີ່ກ້າວໜ້າສໍາລັບ
ການປັບປຸງຜະລິດຕະພັນກະສິກໍາ: ການວິເຄາະ bibliometric. Agronomy 10 (12), ມາດຕາ 12. https://doi.org/10.3390/agronomy10121989.
Armstrong, I., Pirrone-Brusse, M., Smith, A., Jadud, M., 2011. The flying gator: to aerial robotics in occam-π. ຊຸມຊົນ. ສະຖາປະນິກຂະບວນການ. 2011, 329–340. https://doi. org/10.3233/978-1-60750-774-1-329.
Arora, SD, Chakraborty, A., 2021. ໂຄງສ້າງທາງປັນຍາຂອງພຶດຕິກໍາການຈົ່ມຂອງຜູ້ບໍລິໂພກ (CCB) ການຄົ້ນຄວ້າ: ການວິເຄາະ bibliometric. J. Business Res. 122, 60–74.
Aslan, MF, Durdu, A., Sabanci, K., Ropelewska, E., Gültekin, SS, 2022.
ການສໍາຫຼວດທີ່ສົມບູນແບບຂອງການສຶກສາທີ່ຜ່ານມາກັບ UAV ສໍາລັບການກະສິກໍາທີ່ຊັດເຈນໃນພື້ນທີ່ເປີດແລະເຮືອນແກ້ວ. ແອັບ. ວິທະຍາສາດ. 12 (3), 1047. https://doi.org/10.3390/.
app12031047.
Atkinson, JA, Jackson, RJ, Bentley, AR, Ober, E., & Wells, DM (2018). Field Phenotyping ສໍາລັບອະນາຄົດ. ໃນການທົບທວນພືດປະຈໍາປີທາງອອນລາຍ (ໜ້າ 719–736). ຈອນ
Wiley & Sons, Ltd. doi: 10.1002/9781119312994.apr0651.
Austin, R., 2010. Unmanned Aircraft Systems: UAVS Design, Development and deployment. ໃນ: ລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ: UAVS ການອອກແບບ, ການພັດທະນາ ແລະ
ການນຳໃຊ້. John Wiley ແລະລູກຊາຍ. https://doi.org/10.1002/9780470664797.
Awais, M., Li, W., Cheema, MJM, Zaman, QU, Shaheen, A., Aslam, B., Zhu, W., Ajmal, M., Faheem, M., Hussain, S., Nadeem, AA, Afzal, MM, Liu, C., 2022. ການຮັບຮູ້ທາງໄກຈາກ UAV ໃນຄວາມກົດດັນຂອງພືດ ຈິນຕະນາການໂດຍໃຊ້ເຊັນເຊີຄວາມຮ້ອນຄວາມລະອຽດສູງສໍາລັບການປະຕິບັດກະສິກໍາດິຈິຕອນ: ການທົບທວນຄືນ meta. int. J. Environ. ວິທະຍາສາດ. ເທັກໂນໂລຍີ. https://doi.
org/10.1007/s13762-021-03801-5.
Bacco, M., Berton, A., Ferro, E., Gennaro, C., Gotta, A., Matteoli, S., Paonessa, F., Ruggeri, M., Virone, G., Zanella, A., 2018. Smart farming: ໂອກາດ, ສິ່ງທ້າທາຍ
ແລະຜູ້ໃຊ້ເຕັກໂນໂລຊີ. 2018 IoT Vertical ແລະ. ກອງປະຊຸມສຸດຍອດຫົວຂໍ້ກ່ຽວກັບການກະສິກໍາ -Tuscany (IOT Tuscany) 1–6. https://doi.org/10.1109/IOTTUSCANY.2018.8373043.
Bah, MD, Hafiane, A., Canals, R., 2018. ການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງດ້ວຍການຕິດສະຫຼາກຂໍ້ມູນແບບບໍ່ມີການຄວບຄຸມສຳລັບການກວດຫາຫຍ້າໃນການປູກພືດເສັ້ນໃນຮູບພາບ UAV. ການຮັບຮູ້ທາງໄກ 10 (11), 1690.
https://doi.org/10.3390/rs10111690.
Baldi, S., 1998. Normative versus social constructivist processes in ການຈັດສັນການອ້າງອີງ: ຮູບແບບການວິເຄາະເຄືອຂ່າຍ. ມ. ສັງຄົມ. ພຣະນິມິດ 63 (6), 829–846. https://doi.
org/10.2307/2657504.
Baluja, J., Diago, MP, Balda, P., Zorer, R., Meggio, F., Morales, F., Tardaguila, J., 2012. ການປະເມີນຄວາມຜັນຜວນຂອງສະພາບນໍ້າໃນສວນໝາກອະງຸ່ນໂດຍຄວາມຮ້ອນ ແລະຫຼາຍສີ
ຮູບພາບທີ່ໃຊ້ຍົນບໍ່ມີຄົນຂັບ (UAV). ຊົນລະປະທານ. ວິທະຍາສາດ. 30 (6), 511–522. https://doi.org/10.1007/s00271-012-0382-9.
Barabaschi, D., Tondelli, A., Desiderio, F., Volante, A., Vaccino, P., Val`e, G., Cattivelli, L., ການປັບປຸງພັນລຸ້ນຕໍ່ໄປ. ວິທະຍາສາດພືດ. 242, 3–13. https://doi.org/10.1016/j.
plantci.2015.07.010.
Barbedo, JGA, Koenigkan, LV, 2018. ທັດສະນະກ່ຽວກັບການນໍາໃຊ້ລະບົບທາງອາກາດທີ່ບໍ່ມີຄົນຂັບເພື່ອຕິດຕາມງົວ. Outlook Agric. 47 (3), 214–222. https://doi.org/10.1177/0030727018781876.
Bareth, G., Aasen, H., Bendig, J., Gnyp, ML, Bolten, A., Jung, A., Michels, R., Soukkamaki, ¨ J., 2015. Low-weight and UAV-based hyperspectral ກ້ອງຖ່າຍຮູບເຕັມເຟຣມ
ສໍາລັບການຕິດຕາມກວດກາການປູກພືດ: ການປຽບທຽບ Spectral ກັບການວັດແທກ spectroradiometer Portable. Photogrammetrie, Fernerkundung, Geoinformation 2015 (1), 69–79.
https://doi.org/10.1127/pfg/2015/0256.
Barrientos, A., Colorado, J., del Cerro, J., Martinez, A., Rossi, C., Sanz, D., Valente, J., Aerial remote sensing in Agriculture: ວິທີປະຕິບັດຕົວຈິງຕໍ່ກັບການປົກຄຸມພື້ນທີ່
ແລະການວາງແຜນເສັ້ນທາງສໍາລັບເຮືອຂອງຫຸ່ນຍົນທາງອາກາດຂະຫນາດນ້ອຍ. J. Field Rob. 28 (5), 667–689. https://doi.org/10.1002/rob.20403.
Basiri, A., Mariani, V., Silano, G., Aatif, M., Iannelli, L., Glielmo, L., 2022. ການສໍາຫຼວດກ່ຽວກັບການນໍາໃຊ້ວິທີການວາງແຜນເສັ້ນທາງສໍາລັບ UAVs ຫຼາຍ rotor ໃນຄວາມແມ່ນຍໍາ
ກະສິກຳ. J. Navig. 75 (2), 364–383.
Basnet, B., Bang, J., 2018. ການກະເສດທີ່ທັນສະໄໝຂອງຄວາມຮູ້ດ້ານກະສິກຳ: ການທົບທວນກ່ຽວກັບລະບົບການຮັບຮູ້ທີ່ນຳໃຊ້ ແລະການວິເຄາະຂໍ້ມູນ. J. Sens. 2018, 1–13.
Bendig, J., Bolten, A., Bareth, G., 2013. ການຖ່າຍພາບທີ່ອີງໃສ່ UAV ສໍາລັບແບບຈໍາລອງດ້ານການປູກພືດທີ່ມີຄວາມລະອຽດສູງຫຼາຍຊົ່ວຄາວ, ເພື່ອຕິດຕາມການປ່ຽນແປງຂອງການເຕີບໂຕຂອງພືດ. Photogrammetrie, Fernerkundung, Geoinformation 2013 (6), 551–562. https://doi. org/10.1127/1432-8364/2013/0200.
Bendig, J., Bolten, A., Bennertz, S., Broscheit, J., Eichfuss, S., Bareth, G., 2014. ການຄາດຄະເນຊີວະມວນຂອງເຂົ້າບາເລໂດຍໃຊ້ຕົວແບບດ້ານການປູກພືດ (CSMs) ທີ່ມາຈາກ UAVbased RGB imaging. ການຮັບຮູ້ທາງໄກ 6 (11), 10395–10412.
Bendig, J., Yu, K., Aasen, H., Bolten, A., Bennertz, S., Broscheit, J., Gnyp, ML, Bareth, G., 2015. ການລວມເອົາຄວາມສູງຂອງພືດທີ່ໃຊ້ UAV ຈາກພື້ນຜິວການປູກພືດ ຕົວແບບ,
ສັງເກດເຫັນ, ແລະຢູ່ໃກ້ກັບດັດຊະນີພືດ infrared ສໍາລັບການຕິດຕາມຊີວະມວນໃນ barley. int. J. Appl. ໂລກ Obs. Geoinf. 39, 79–87. https://doi.org/10.1016/j.jag.2015.02.012.
Berni, JA, Zarco-Tejada, PJ, Sepulcre-Canto, ´ G., Ferreres, E., Villalobos, F., 2009a. ການສ້າງແຜນທີ່ການປະພຶດຂອງເຮືອນຍອດ ແລະ CWSI ໃນສວນໝາກກອກ ໂດຍໃຊ້ຄວາມລະອຽດສູງ
ຮູບພາບການຮັບຮູ້ທາງໄກຈາກຄວາມຮ້ອນ. ສະພາບແວດລ້ອມທາງໄກ. 113 (11), 2380–2388. https://doi.org/10.1016/j.rse.2009.06.018.
Berni, JA, Zarco-Tejada, PJ, Suarez, ´ L., Ferreres, E., 2009b. ການຮັບຮູ້ທາງໄກຫຼາຍຊ່ອງແຄບຄວາມຮ້ອນ ແລະວົງແຄບສຳລັບການຕິດຕາມພືດພັນຈາກຍານຍົນທີ່ບໍ່ມີຄົນຂັບ. IEEE Trans. Geosci. ໄກສອນ ພົມວິຫານ 47 (3), 722–738.
Bouzembrak, Y., Klüche, M., Gavai, A., Marvin, HJP, 2019. Internet of Things in food safety: ການທົບທວນວັນນະຄະດີ ແລະການວິເຄາະ bibliometric. ແນວໂນ້ມອາຫານ Sci. ເທັກໂນໂລຍີ. 94,54–64. https://doi.org/10.1016/j.tifs.2019.11.002.
Brewster, C., Roussaki, I., Kalatzis, N., Doolin, K., Ellis, K., 2017. IoT ໃນກະສິກໍາ: ການອອກແບບນັກບິນຂະຫນາດໃຫຍ່ໃນເອີຣົບ. IEEE Commun. ແມັກ. 55 (9), 26–33.
Buters, TM, Belton, D., Cross, AT, 2019. Multi-sensor UAV ຕິດຕາມເບ້ຍຂອງແຕ່ລະຄົນ ແລະຊຸມຊົນເບ້ຍດ້ວຍຄວາມຖືກຕ້ອງ millimeter. Drones 3 (4), 81 .
https://doi.org/10.3390/drones3040081.
Candiago, S., Remondino, F., De Giglio, M., Dubbini, M., Gattelli, M., 2015. ການປະເມີນຮູບພາບ multispectral ແລະດັດຊະນີພືດພັນສໍາລັບຄໍາຮ້ອງສະຫມັກກະສິກໍາທີ່ຊັດເຈນຈາກຮູບພາບ UAV. ການຮັບຮູ້ທາງໄກ 7 (4), 4026–4047. https://doi.org/10.3390/rs70404026.
Cao, Y., Li, GL, Luo, YK, Pan, Q., Zhang, SY, 2020. ການຕິດຕາມຕົວຊີ້ວັດການຈະເລີນເຕີບໂຕຂອງນ້ຳຕານ beet ໂດຍໃຊ້ດັດຊະນີພືດພັນແບບເຄື່ອນໄຫວກ້ວາງ (WDRVI) ທີ່ມາຈາກ UAV
ຮູບພາບ multispectral. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 171, 105331 https://doi.org/10.1016/j.compag.2020.105331.
Casillas, J., Acedo, F., 2007. ການວິວັດທະນາການຂອງໂຄງສ້າງທາງປັນຍາຂອງວັນນະຄະດີທຸລະກິດຄອບຄົວ: ການສຶກສາ bibliometric ຂອງ FBR. ທຸລະກິດຄອບຄົວ Rev. 20 (2), 141–162.
Cen, H., Wan, L., Zhu, J., Li, Y., Li, X., Zhu, Y., Weng, H., Wu, W., Yin, W., Xu, C., Bao, Y., Feng, L., Shou, J., He, Y., 2019. ການຕິດຕາມແບບເຄື່ອນໄຫວຂອງຊີວະມວນຂອງເຂົ້າພາຍໃຕ້
ການປິ່ນປົວໄນໂຕຣເຈນທີ່ແຕກຕ່າງກັນໂດຍນໍາໃຊ້ UAV ນ້ໍາຫນັກເບົາທີ່ມີກ້ອງຖ່າຍຮູບ snapshot ກອບຮູບພາບຄູ່. ວິທີການປູກ 15 (1), 32. https://doi.org/10.1186/s13007-019- .
0418-8.
Chamuah, A., Singh, R., 2019. ການຮັບປະກັນຄວາມຍືນຍົງໃນກະສິກຳອິນເດຍຜ່ານ UAV ພົນລະເຮືອນ: ທັດສະນະນະວັດຕະກໍາທີ່ຮັບຜິດຊອບ. SN Appl. ວິທະຍາສາດ. 2 (1), 106. https://
doi.org/10.1007/s42452-019-1901-6.
Chamuah, A., Singh, R., 2022. ການຄຸ້ມຄອງທີ່ມີຄວາມຮັບຜິດຊອບຂອງນະວັດຕະກໍາຍານອາວະກາດບໍ່ມີຄົນຂັບ (UAV) ພົນລະເຮືອນສໍາລັບຄໍາຮ້ອງສະຫມັກປະກັນໄພພືດຂອງອິນເດຍ. J. ຮັບຜິດຊອບ
ເທັກໂນໂລຍີ. 9, 100025 https://doi.org/10.1016/j.jrt.2022.100025.
Chen, A., Orlov-Levin, V., Meron, M., 2019. ການນຳໃຊ້ພາບຖ່າຍທາງອາກາດທີ່ມີຄວາມລະອຽດສູງຂອງເຮືອນຍອດຂອງການປູກພືດເພື່ອການຄຸ້ມຄອງຊົນລະປະທານທີ່ມີຄວາມຊັດເຈນ. ກະເສດ. ນ້ຳ
ຈັດການ. 216, 196–205. https://doi.org/10.1016/j.agwat.2019.02.017.
Daakir, M., Pierrot-Deseilligny, M., Bosser, P., Pichard, F., Thom, C., Rabot, Y., Martin, O., 2017. UAV ນ້ຳໜັກເບົາພ້ອມການຖ່າຍຮູບເທິງເຮືອ ແລະ ການຈັດຕຳແໜ່ງ GPS ຄວາມຖີ່ດຽວ ສໍາລັບຄໍາຮ້ອງສະຫມັກການວັດແທກ. ISPRS J. Photogramm. ຄວາມຮູ້ສຶກທາງໄກ 127, 115–126. https://doi.org/10.1016/j.isprsjprs.2016.12.007.
Dawaliby, S., Aberkane, A., Bradai, A., 2020. ແພລດຟອມ IoT ທີ່ອີງໃສ່ Blockchain ສໍາລັບການຄຸ້ມຄອງການດໍາເນີນງານຂອງ drone ອັດຕະໂນມັດ. ໃນ: ການດໍາເນີນກອງປະຊຸມ ACM ຄັ້ງທີ 2
MobiCom Workshop on Drone Assisted Wireless Communications for 5G and Beyond, ໜ້າ 31–36. https://doi.org/10.1145/3414045.3415939.
ວັນ, RA, Gastel, B., 1998. ວິທີການຂຽນແລະເຜີຍແຜ່ເອກະສານວິທະຍາສາດ. ຫນັງສືພິມມະຫາວິທະຍາໄລ Cambridge. de Castro, AI, Pena, ˜ JM, Torres-Sanchez, ´J., Jim'enez-Brenes, FM, ValenciaGredilla, F., Recasens, J., Lopez-Granados, ´ F., 2020. ການສ້າງແຜນທີ່ cynodon dactylon infesting ກວມເອົາການປູກພືດດ້ວຍຂັ້ນຕອນການຕັດໄມ້ອັດຕະໂນມັດ - OBIA ແລະຮູບພາບ UAV ສໍາລັບການປູກຝັງທີ່ຊັດເຈນ. Remote Sensing 12 (1), 56. https://doi.org/10.3390/rs12010056.
de Castro, AI, Torres-S' anchez, J., Pena, ˜ JM, Jim'enez-Brenes, FM, Csillik, O., Lopez- ´Granados, F., 2018. ສູດການຄິດໄລ່ປ່າໄມ້ແບບສຸ່ມອັດຕະໂນມັດ - OBIA ສໍາລັບ ການສ້າງແຜນທີ່ຕົ້ນຫຍ້າລະຫວ່າງ ແລະພາຍໃນແຖວການປູກພືດໂດຍໃຊ້ຮູບພາບ UAV. ການຮັບຮູ້ທາງໄກ 10 (2). https://doi.org/10.3390/rs10020285.
Demir, N., Sonmez, ¨ NK, Akar, T., Ünal, S., 2018. ການວັດແທກຄວາມສູງຂອງພືດຊະນິດພັນສາລີແບບອັດຕະໂນມັດໂດຍໃຊ້ DSM ທີ່ມາຈາກ UAV Imagery. ຂັ້ນຕອນ 2 (7), 350. https://doi.org/10.3390/ecrs-2-05163.
Deng, J., Zhong, Z., Huang, H., Lan, Y., Han, Y., Zhang, Y., 2020. ເຄືອຂ່າຍການແບ່ງສ່ວນ semantic ທີ່ມີນ້ໍາຫນັກເບົາສໍາລັບການສ້າງແຜນທີ່ຫຍ້າແບບສົດໆໂດຍໃຊ້ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ. ແອັບ. ວິທະຍາສາດ. 10 (20), 7132. https://doi.org/10.3390/app10207132.
Deng, L., Mao, Z., Li, X., Hu, Z., Duan, F., Yan, Y., 2018. UAV-based multispectral remote sensing for precision Agriculture: ການປຽບທຽບລະຫວ່າງກ້ອງຖ່າຍຮູບທີ່ແຕກຕ່າງກັນ. ISPRS J. Photogramm. ຄວາມຮູ້ສຶກທາງໄກ 146, 124–136.
Diaz-Gonzalez, FA, Vuelvas, J., Correa, CA, Vallejo, VE, Patino, D., 2022. ການຮຽນຮູ້ເຄື່ອງຈັກ ແລະເຕັກນິກການຮັບຮູ້ທາງໄກທີ່ໃຊ້ໃນການຄາດຄະເນຕົວຊີ້ວັດດິນ – ທົບທວນ. Ecol. Ind. 135, 108517 https://doi.org/10.1016/j.ecolind.2021.108517.
Díaz-Varela, RA, De la Rosa, R., Leon, ´ L., Zarco-Tejada, PJ, 2015. ຮູບພາບ UAV ທີ່ມີຄວາມລະອຽດສູງໃນອາກາດເພື່ອປະເມີນພາລາມິເຕີຂອງມົງກຸດຕົ້ນໝາກກອກ ໂດຍໃຊ້ຮູບ 3D
reconstruction: ຄໍາຮ້ອງສະຫມັກໃນການທົດລອງການປັບປຸງພັນ. ການຮັບຮູ້ທາງໄກ 7 (4), 4213–4232. https://doi.org/10.3390/rs70404213.
Dixit, A., Jakhar, SK, 2021. ການຄຸ້ມຄອງຄວາມອາດສາມາດຂອງສະໜາມບິນ: ການທົບທວນຄືນ ແລະການວິເຄາະ bibliometric. J. Air Transp. ຈັດການ. 91, 102010.
Dong, T., Shang, J., Liu, J., Qian, B., Jing, Q., Ma, B., Huffman, T., Geng, X., Sow, A., Shi, Y., Canisius, F., Jiao, X., Kovacs, JM, Walters, D., Cable, J., Wilson, J., 2019.
ການນໍາໃຊ້ຮູບພາບ RapidEye ເພື່ອກໍານົດການປ່ຽນແປງພາຍໃນພາກສະຫນາມຂອງການຂະຫຍາຍຕົວຂອງພືດແລະຜົນຜະລິດໃນ Ontario, ການາດາ. Precision Agric. 20 (6), 1231–1250. https://doi.org/10.1007/
s11119-019-09646-w.
Dutta, PK, Mitra, S., 2021. ການນຳໃຊ້ drones ກະສິກຳ ແລະ iot ເພື່ອເຂົ້າໃຈລະບົບຕ່ອງໂສ້ການສະໜອງອາຫານໃນໄລຍະຫຼັງ COVID-19. ໃນ: Choudhury, A., Biswas, A., Prateek, M.,
Chakrabarti, A. (Eds.), ຂໍ້ມູນຂ່າວສານກະສິກໍາ: ອັດຕະໂນມັດການນໍາໃຊ້ IoT ແລະການຮຽນຮູ້ເຄື່ອງຈັກ. Wiley, ໜ້າ 67–87. van Eck, N., Waltman, L., 2009. ການສໍາຫຼວດຊອບແວ: VOSviewer, ໂຄງການຄອມພິວເຕີສໍາລັບແຜນທີ່ bibliometric. ວິທະຍາສາດ 84 (2), 523–538. https://doi.org/10.1007/s11192-009-0146-3.
Elijah, O., Rahman, TA, Orikumhi, I., Leow, CY, Hindia, MN, 2018. ພາບລວມຂອງ Internet of Things (IoT) ແລະການວິເຄາະຂໍ້ມູນໃນກະສິກຳ: ຜົນປະໂຫຍດ ແລະສິ່ງທ້າທາຍ.
IEEE Internet Things J. 5 (5), 3758–3773.
Enciso, J., Avila, CA, Jung, J., Elsayed-Farag, S., Chang, A., Yeom, J., Landivar, J.,Maeda, M., Chavez, JC, 2019. ຄວາມຖືກຕ້ອງຂອງການປູກຝັງ UAV ແລະພາກສະຫນາມ
ການວັດແທກແນວພັນຫມາກເລັ່ນ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 158, 278–283. https://doi.org/10.1016/j.compag.2019.02.011.
Espinoza, CZ, Khot, LR, Sankaran, S., Jacoby, PW, 2017. ຄວາມລະອຽດສູງ multispectral ແລະ thermal sensing-based remote sensing-based water assessment in
grapevines ຊົນ ລະ ປະ ທານ ໃຕ້ ດິນ . Remote Sensing 9 (9), 961. https://doi.org/ 10.3390/rs9090961.
Ewing, J., Oommen, T., Jayakumar, P., Alger, R., 2020. ການນໍາໃຊ້ການຮັບຮູ້ຫ່າງໄກສອກຫຼີກ hyperspectral ສໍາລັບການຊັ້ນດິນ. Remote Sensing 12 (20), 3312. ttps://doi.org/10.3390/.
rs12203312.
Fawcett, D., Panigada, C., Tagliabue, G., Boschetti, M., Celesti, M., Evdokimov, A., Biriukova, K., Colombo, R., Miglietta, F., Rascher, U., Anderson, K., 2020. ການປະເມີນຫຼາຍຂະໜາດຂອງການສະທ້ອນພື້ນຜິວຫຼາຍສີທີ່ອີງໃສ່ drone ແລະດັດຊະນີພືດໃນສະພາບການດໍາເນີນງານ. ການຮັບຮູ້ທາງໄກ 12 (3), 514.
Feng, X., Yan, F., Liu, X., 2019. ການສຶກສາເທັກໂນໂລຍີການສື່ສານໄຮ້ສາຍໃນອິນເຕີເນັດຂອງສິ່ງຕ່າງໆເພື່ອການກະເສດທີ່ຊັດເຈນ. Wireless Pers. ຊຸມຊົນ. 108 (3),
1785†"1802.
Ferreira, MP, Pinto, CF, Serra, FR, 2014. ທິດສະດີຄ່າໃຊ້ຈ່າຍຂອງທຸລະກໍາໃນການຄົ້ນຄວ້າທຸລະກິດລະຫວ່າງປະເທດ: ການສຶກສາ bibliometric ໃນໄລຍະສາມທົດສະວັດ. ວິທະຍາສາດ 98 (3), 1899–1922. https://doi.org/10.1007/s11192-013-1172-8.
Fisher, P., Abuzar, M., Rab, M., Best, F., Chandra, S., 2009. ຄວາມກ້າວຫນ້າທາງດ້ານການກະເສດໃນພາກຕາເວັນອອກສຽງໃຕ້ຂອງອົດສະຕາລີ. I. ວິທີການຖົດຖອຍເພື່ອຈໍາລອງ
ການປ່ຽນແປງທາງດ້ານພື້ນທີ່ຂອງຜົນຜະລິດທັນຍາພືດໂດຍນໍາໃຊ້ຜົນຜະລິດ paddock ປະຫວັດສາດຂອງຊາວກະສິກອນແລະດັດຊະນີຄວາມແຕກຕ່າງຂອງພືດປົກກະຕິ. ວິທະຍາສາດການປູກຝັງ. 60 (9), 844–858.
Floreano, D., Wood, RJ, 2015. ວິທະຍາສາດ, ເຕັກໂນໂລຊີ ແລະອະນາຄົດຂອງ drones autonomous ຂະຫນາດນ້ອຍ. ທຳມະຊາດ 521 (7553), 460–466. https://doi.org/10.1038/nature14542.
Friha, O., Ferrag, MA, Shu, L., Maglaras, LA, Wang, X., 2021. ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆສໍາລັບອະນາຄົດຂອງກະສິກໍາສະຫມາດ: ການສໍາຫຼວດທີ່ສົມບູນແບບຂອງເຕັກໂນໂລຢີທີ່ພົ້ນເດັ່ນຂື້ນ. IEEE CAA J. Autom. ຊີນິກາ 8 (4), 718–752.
Fuentes-Pacheco, J., Torres-Olivares, J., Roman-Rangel, E., Cervantes, S., JuarezLopez, P., Hermosillo-Valadez, J., Rendon-Mancha, ´ JM, 2019. ການແບ່ງສ່ວນຂອງພືດ fig ຈາກຮູບພາບທາງອາກາດໂດຍນໍາໃຊ້ເຄືອຂ່າຍການເຂົ້າລະຫັດ convolutional ເລິກ. Remote Sensing 11 (10), 1157. https://doi.org/10.3390/rs11101157.
Gago, J., Douthe, C., Coopman, RE, Gallego, PP, Ribas-Carbo, M., Flexas, J., Escalona, J., Medrano, H., 2015. UAVs ທ້າທາຍທີ່ຈະປະເມີນຄວາມກົດດັນນ້ໍາສໍາລັບ
ກະສິກຳແບບຍືນຍົງ. ກະເສດ. ການຄຸ້ມຄອງນ້ໍາ. 153, 9–19. https://doi.org/10.1016/j. agwat.2015.01.020.
García-Tejero, IF, Rubio, AE, Vinuela, ˜ I., Hern´ andez, A., Guti´errez-Gordillo, S., Rodríguez-Pleguezuelo, CR, Dur´ an-Zuazo, VH, 2018. ການຖ່າຍຮູບຄວາມຮ້ອນ ຢູ່ໃນພືດ
ລະດັບເພື່ອປະເມີນສະຖານະພາບການປູກພືດ-ນ້ຳໃນຕົ້ນອະມອນ (cv. Guara) ພາຍໃຕ້ຍຸດທະສາດການຊົນລະປະທານທີ່ຂາດດຸນ. ກະເສດ. ການຄຸ້ມຄອງນ້ໍາ. 208, 176–186. https://doi.org/10.1016/j.
agwat.2018.06.002.
Garzonio, R., Di Mauro, B., Colombo, R., Cogliati, S., 2017. ການສະທ້ອນພື້ນຜິວແລະການວັດແທກ fluorescence suninduced ໂດຍໃຊ້ UAS hyperspectral ຂະຫນາດນ້ອຍ. Remote Sensing 9 (5), 472. https://doi.org/10.3390/rs9050472. Gaˇsparovi´c, M., Zrinjski, M., Barkovi´c, Đ., Radoˇcaj, D., 2020. ວິທີການອັດຕະໂນມັດສໍາລັບ
ແຜນທີ່ວັດສະພືດໃນທົ່ງນາ oat ໂດຍອີງໃສ່ຮູບພາບ UAV. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ.
Gebbers, R., Adamchuk, VI, 2010. ການກະເສດທີ່ຊັດເຈນ ແລະ ຄ້ຳປະກັນສະບຽງອາຫານ. ວິທະຍາສາດ 327 (5967), 828–831. https://doi.org/10.1126/science.1183899.
Geipel, J., Link, J., Claupein, W., 2014. ການສ້າງແບບຈໍາລອງແບບສະເປກຕາ ແລະທາງກວ້າງຂອງຜົນຜະລິດສາລີ ໂດຍອີງໃສ່ຮູບພາບທາງອາກາດ ແລະແບບຈໍາລອງດ້ານການປູກພືດທີ່ໄດ້ມາດ້ວຍລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ. ການຮັບຮູ້ທາງໄກ 6 (11), 10335–10355. https://doi.org/10.3390/rs61110335.
Geng, D., Feng, Y., Zhu, Q., 2020. ການອອກແບບແບບຍືນຍົງສໍາລັບຜູ້ໃຊ້: ການທົບທວນຄືນວັນນະຄະດີແລະການວິເຄາະ bibliometric. ສິ່ງແວດລ້ອມ. ວິທະຍາສາດ. ມົນລະພິດ. Res. 27 (24), 29824–29836. https://doi. org/10.1007/s11356-020-09283-1.
Gevaert, CM, Suomalainen, J., Tang, J., Kooistra, L., 2015. ການສ້າງພື້ນຜິວຕອບສະໜອງ spectraltemporal ໂດຍການລວມດາວທຽມ multispectral ແລະ hyperspectral
ຮູບພາບ UAV ສໍາລັບຄໍາຮ້ອງສະຫມັກກະສິກໍາທີ່ຊັດເຈນ. IEEE J. Sel. ເທິງ. ແອັບ. ໂລກ Obs. Remote Sens. 8 (6), 3140–3146. ttps://doi.org/10.1109/JSTARS.2015.2406339.
Gill, SS, Chana, I., Buyya, R., 2017. IoT based Agriculture as a cloud and big dataservice: the beginning of digital India. J. Org. ແລະຄອມພິວເຕີຜູ້ໃຊ້ສຸດທ້າຍ. (JOEUC) 29 (4),
1†"23.
Gmür, M., 2006. ການວິເຄາະການອ້າງອິງຮ່ວມກັນ ແລະການຄົ້ນຫາວິທະຍາໄລທີ່ເບິ່ງບໍ່ເຫັນ: ການປະເມີນວິທີການ. ວິທະຍາສາດ 57 (1), 27–57. https://doi.org/10.1023/
a:1023619503005.
Gnadinger, ¨ F., Schmidhalter, U., 2017. ການນັບຈໍານວນດິຈິຕອນຂອງພືດສາລີໂດຍ Unmanned Aerial Vehicles (UAVs). ການຮັບຮູ້ທາງໄກ 9 (6). https://doi.org/10.3390/rs9060544.
Gokto ¨ ǧan, AH, Sukkarieh, S., Bryson, M., Randle, J., Lupton, T., Hung, C., 2010. ຍານຍົນບໍ່ມີຄົນຂັບແບບ Rotary-wing ສໍາລັບເຝົ້າລະວັງຫຍ້າໃນນໍ້າ ແລະ
ການຄຸ້ມຄອງ. J. Intell. ລະບົບຫຸ່ນຍົນ: ທິດສະດີ. ແອັບ. 57 (1–4), 467–484. https://doi. org/10.1007/s10846-009-9371-5.
Gomez-Cand ´on, ´ D., De Castro, AI, Lopez-Granados, ´ F., 2014. ການປະເມີນຄວາມຖືກຕ້ອງຂອງ mosaics ຈາກພາບຖ່າຍທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ (UAV) ສໍາລັບຈຸດປະສົງກະສິກໍາທີ່ມີຄວາມແມ່ນຍໍາໃນ wheat. Precis. ກະເສດ. 15 (1), 44–56. https://doi.org/10.1007/s11119-013-9335-4.
Gomez-Cand ´on, ´ D., Virlet, N., Labb´e, S., Jolivot, A., Regnard, J.-L., 2016. ການສະແດງພູມສັນຖານຂອງຄວາມດັນນ້ຳໃນຂະໜາດຂອງຕົ້ນໄມ້ໂດຍພາບ UAV-sensed : ຄວາມເຂົ້າໃຈໃຫມ່ສໍາລັບ
ການໄດ້ຮັບຄວາມຮ້ອນແລະການປັບທຽບ. Precis. ກະເສດ. 17 (6), 786–800. https://doi.org/10.1007/s11119-016-9449-6.
Gonzalez-Dugo, V., Zarco-Tejada, PJ, Ferreres, E., 2014. ການນຳໃຊ້ ແລະ ຂໍ້ຈຳກັດຂອງການນຳໃຊ້ດັດຊະນີຄວາມຄຽດຂອງນ້ຳໃນການປູກພືດເປັນຕົວຊີ້ບອກເຖິງການຂາດດຸນນ້ຳໃນສວນໝາກນາວ. ກະເສດ. ສໍາລັບ. Meteorol. 198–199, 94–104. https://doi.org/10.1016/j. agrformet.2014.08.003.
Gonzalez-Dugo, V., Zarco-Tejada, P., Nicolas, ´ E., Nortes, PA, Alarcon, ´ JJ, Intrigliolo, DS, Ferreres, E., 2013. ການນໍາໃຊ້ຮູບພາບຄວາມຮ້ອນ UAV ຄວາມລະອຽດສູງເພື່ອ
ປະເມີນຄວາມຜັນຜວນຂອງສະພາບນໍ້າຂອງຕົ້ນໄມ້ໃຫ້ໝາກຫ້າຊະນິດພາຍໃນສວນໝາກໄມ້ທາງການຄ້າ. Precis. ກະເສດ. 14 (6), 660–678. https://doi.org/10.1007/s11119-013-9322-9.
Goyal, K., Kumar, S., 2021. ຄວາມຮູ້ກ່ຽວກັບການເງິນ: ການທົບທວນລະບົບ ແລະການວິເຄາະ bibliometric. int. J. Consumer Studies 45 (1), 80–105. https://doi.org/10.1111/
ijcs.12605.
Grenzdorffer, ¨ GJ, Engel, A., Teichert, B., 2008. ທ່າແຮງ photogrammetric ຂອງ uavs ລາຄາຖືກໃນປ່າໄມ້ ແລະ ການກະສິກໍາ. ຄັງເກັບຂໍ້ມູນສາກົນຂອງ Photogrammetry, ການຮັບຮູ້ທາງໄກແລະວິທະຍາສາດຂໍ້ມູນຂ່າວສານທາງກວ້າງຂວາງ – ISPRS Archives 37, 1207–1213. https://www.scopus.com/inward/record.uri?eid=2-s2.0-85039543258&partnerI D=40&md5=b4b2d639257e8ddb5a373d15959c4e1e.
Guan, S., Fukami, K., Matsunaka, H., Okami, M., Tanaka, R., Nakano, H., Sakai, T., Nakano, K., Ohdan, H., Takahashi, K., 2019. ການປະເມີນຄວາມກ່ຽວຂ້ອງກັນຂອງຄວາມລະອຽດສູງ
NDVI ກັບລະດັບການໃສ່ຝຸ່ນ ແລະຜົນຜະລິດຂອງເຂົ້າ ແລະພືດສາລີ ໂດຍໃຊ້ UAVs ຂະໜາດນ້ອຍ. ການຮັບຮູ້ທາງໄກ 11 (2), 112.
Gundolf, K., Filser, M., 2013. ການຄົ້ນຄວ້າດ້ານການຄຸ້ມຄອງ ແລະສາສະໜາ: ການວິເຄາະອ້າງອີງ. J. ລົດເມ. ຈັນຍາບັນ 112 (1), 177–185.
Guo, Q., Zhu, Y., Tang, Y., Hou, C., He, Y., Zhuang, J., Zheng, Y., Luo, S., 2020. ການຈໍາລອງ CFD ແລະການທົດລອງການຢັ້ງຢືນທາງກວ້າງຂອງພື້ນ ແລະການແຜ່ກະຈາຍຊົ່ວຄາວຂອງ
ກະແສລົມຫຼຸດລົງຂອງ UAV ກະສິກໍາ quad-rotor ຢູ່ໃນ hover. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 172, 105343 https://doi.org/10.1016/j.compag.2020.105343.
Haghighattalab, A., Gonz´ alez P´erez, L., Mondal, S., Singh, D., Schinstock, D., Rutkoski, J., Ortiz-Monasterio, I., Singh, RP, Goodin, D. , ໂປແລນ, J., 2016.
ການນໍາໃຊ້ລະບົບທາງອາກາດບໍ່ມີຄົນຂັບສໍາລັບການ phenotyping ສູງ throughput ຂອງສວນກ້າການປັບປຸງພັນ wheat ຂະຫນາດໃຫຍ່. ວິທີການປູກ 12 (1). https://doi.org/10.1186/s13007-
016-0134-6.
Hakala, T., Honkavaara, E., Saari, H., Makynen, ¨ J., Kaivosoja, J., Pesonen, L., & Pol ¨ onen, ¨I., 2013. ການຖ່າຍພາບສະເປກຈາກ UAVs ພາຍໃຕ້ສະພາບແສງທີ່ຫຼາກຫຼາຍ. . ໃນ GG Bill R. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (ສະບັບທີ 40, ສະບັບທີ 1W2, ໜ້າ 189–194). ສະມາຄົມສາກົນສໍາລັບການຖ່າຍຮູບແລະການຮັບຮູ້ທາງໄກ. https://www.scopus.com/inward/record.uri?eid=2-s2.0-848875632.
Hamylton, SM, Morris, RH, Carvalho, RC, Roder, N., Barlow, P., Mills, K., Wang, L. ການປະເມີນເຕັກນິກສໍາລັບການສ້າງແຜນທີ່ຂອງຕົ້ນໄມ້ໃນເກາະຈາກອາກາດບໍ່ມີຄົນຂັບ
ຮູບພາບຍານພາຫະນະ (UAV): ການຈັດປະເພດ Pixel, ການຕີຄວາມຕາ ແລະວິທີການຮຽນຮູ້ເຄື່ອງຈັກ. int. J. Appl. ໂລກ Obs. Geoinf. 89, 102085 https://doi.org/
10.1016/j.jag.2020.102085.
Haque, A., Islam, N., Samrat, NH, Dey, S., Ray, B., 2021. ການປູກຝັງອັດສະລິຍະຜ່ານການເປັນຜູ້ນໍາທີ່ຮັບຜິດຊອບໃນບັງກະລາເທດ: ຄວາມເປັນໄປໄດ້, ໂອກາດ, ແລະນອກເໜືອໄປຈາກນີ້.
ຄວາມຍືນຍົງ 13 (8), 4511.
Hardin, PJ, Hardin, TJ, 2010. ຍານພາຫະນະທົດລອງໄລຍະໄກຂະໜາດນ້ອຍໃນການຄົ້ນຄວ້າສິ່ງແວດລ້ອມ. ເຂັມທິດພູມສາດ 4 (9), 1297–1311. ttps://doi.org/10.1111/j.1749-
8198.2010.00381.x.
Hardin, PJ, Jensen, RR, 2011. ຍານຍົນບໍ່ມີຄົນຂັບຂະໜາດນ້ອຍ ໃນການຮັບຮູ້ທາງໄກສິ່ງແວດລ້ອມ: ສິ່ງທ້າທາຍ ແລະ ໂອກາດ. GISci. ທູດຈາກໄລຍະໄກ 48 (1), 99–111. https://doi.org/10.2747/1548-1603.48.1.99.
He, Y., Nie, P., Zhang, Q., Liu, F., 2021. Agricultural Internet of Things: ເຕັກໂນໂລຊີ ແລະແອັບພລິເຄຊັນ, (ສະບັບທີ 1. 2021). Springer.
Herwitz, SR, Johnson, LF, Dunagan, SE, Higgins, RG, Sullivan, DV, Zheng, J., Lobitz, BM, Leung, JG, Gallmeyer, BA, Aoyagi, M., Slye, RE, Brass, JA, 2004.
ການຖ່າຍພາບຈາກຍົນບໍ່ມີຄົນຂັບ: ການເຝົ້າລະວັງດ້ານກະສິກຳ ແລະ ການສະໜັບສະໜູນການຕັດສິນໃຈ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 44 (1), 49–61. https://doi.org/10.1016/j.
compag.2004.02.006.
Holman, FH, Riche, AB, Michalski, A., Castle, M., Wooster, MJ, Hawkesford, MJ, ລັກສະນະການສົ່ງຂໍ້ມູນຜ່ານພາກສະໜາມສູງຂອງຄວາມສູງຂອງພືດສາລີ ແລະອັດຕາການຂະຫຍາຍຕົວໃນການທົດລອງໃນພາກສະໜາມໂດຍໃຊ້ UAV based remote sensing. ການຮັບຮູ້ທາງໄກ 8 (12). https://doi. org/10.3390/rs8121031.
Honkavaara, E., Saari, H., Kaivosoja, J., Pol ¨ onen, ¨ I., Hakala, T., Litkey, P., M¨akynen, J., Pesonen, L., 2013. ການປະມວນຜົນ ແລະ ການປະເມີນ. ຂອງ spectrometric, ຮູບພາບ stereoscopic ເກັບກໍາໂດຍນໍາໃຊ້ກ້ອງຖ່າຍຮູບ spectral UAV ນ້ໍາຫນັກເບົາສໍາລັບການກະສິກໍາຄວາມແມ່ນຍໍາ. ການຮັບຮູ້ທາງໄກ 5 (10), 5006–5039. https://doi.org/10.3390/rs5105006.
Hossein Motlagh, N., Taleb, T., Arouk, O., 2016. ລະດັບຄວາມສູງຂອງລົດຍົນບໍ່ມີຄົນຂັບໂດຍອີງໃສ່ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆ: ການສໍາຫຼວດທີ່ສົມບູນແບບ ແລະທັດສະນະໃນອະນາຄົດ. IEEE Internet Things J. 3 (6), 899–922. https://doi.org/10.1109/JIOT.2016.2612119.
Hrabar, S., Sukhatme, GS, Corke, P., Usher, K., Roberts, J., 2005. ການປະສົມປະສານ optic-flow ແລະ stereo-based navigation ຂອງ canyons ຕົວເມືອງສໍາລັບ UAV. ໃນປີ 2005 IEEE/RSJ
ກອງປະຊຸມສາກົນກ່ຽວກັບຫຸ່ນຍົນອັດສະລິຍະ ແລະລະບົບ, ໜ້າ 3309–3316. https://doi.org/10.1109/IROS.2005.1544998.
Hsu, T.-C., Yang, H., Chung, Y.-C., Hsu, C.-H., 2020. ແພລະຕະຟອມກະສິກຳ IoT ສ້າງສັນສຳລັບຄອມພິວເຕີ້ໝອກຄລາວ. ຍືນຍົງ. ຄອມພິວເຕີ. Inf. ລະບົບ. 28, 100285.
Huang, H., Deng, J., Lan, Y., Yang, A., Deng, X., Zhang, L., Gonzalez-Andujar, JL, 2018. ເຄືອຂ່າຍ convolutional ຢ່າງເຕັມສ່ວນສໍາລັບການເຮັດແຜນທີ່ຫຍ້າຂອງຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ ( UAV) ຮູບພາບ. PLoS ONE 13 (4), e0196302.
Huang, H., Lan, Y., Yang, A., Zhang, Y., Wen, S., Deng, J., 2020. ການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງທຽບກັບການວິເຄາະຮູບພາບທີ່ອີງໃສ່ວັດຖຸ (OBIA) ໃນແຜນທີ່ຫຍ້າຂອງຮູບພາບ UAV. int. ຈ.
ໄກສອນ ພົມວິຫານ 41 (9), 3446–3479. https://doi.org/10.1080/01431161.2019.1706112.
Huang, H., Yang, A., Tang, Y., Zhuang, J., Hou, C., Tan, Z., Dananjayan, S., He, Y., Guo, Q., Luo, S., 2021. ການປັບສີທີ່ເລິກເຊິ່ງສໍາລັບຮູບພາບ UAV ໃນການຕິດຕາມການປູກພືດ
ການນໍາໃຊ້ການໂອນຮູບແບບ semantic ກັບຄວາມສົນໃຈຂອງທ້ອງຖິ່ນກັບທົ່ວໂລກ. int. J. Appl. ໂລກ Obs. Geoinf. 104, 102590 https://doi.org/10.1016/j.jag.2021.102590.
Huang, YB, Thomson, SJ, Hoffmann, WC, Lan, YB, Fritz, BK, 2013. ການພັດທະນາແລະຄວາມສົດໃສດ້ານຂອງເຕັກໂນໂລຊີຍານພາຫະນະທາງອາກາດບໍ່ມີຄົນຂັບສໍາລັບການຜະລິດກະສິກໍາ
ການຄຸ້ມຄອງ. int. J. ກະເສດ. ຊີວະພາບ. ອັງ. 6 (3), 1–10. https://doi.org/10.3965/j. ijabe.20130603.001.
Huang, Y., Hoffmann, WC, Lan, Y., Wu, W., Fritz, BK, 2009. ການພັດທະນາລະບົບສີດພົ່ນສໍາລັບເວທີຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ. ແອັບ. ອັງ. ກະເສດ. 25 (6), 803–809.
Hunt Jr., ER, Dean Hively, W., Fujikawa, SJ, Linden, DS, Daughtry, CST, McCarty, GW, 2010. ການໄດ້ມາຂອງຮູບຖ່າຍດິຈິຕອນ NIR-ສີຂຽວ-ສີຟ້າຈາກ
ເຮືອບິນບໍ່ມີຄົນຂັບເພື່ອຕິດຕາມການປູກພືດ. ການຮັບຮູ້ທາງໄກ 2 (1), 290–305. https://doi. org/10.3390/rs2010290. Inoue, Y., 2020. ການຮັບຮູ້ທາງໄກຈາກດາວທຽມ ແລະ drone ຂອງການປູກພືດ ແລະດິນສໍາລັບການກະສິກໍາອັດສະລິຍະ, ການທົບທວນຄືນ. ດິນວິທະຍາສາດ. ແກ່ນພືດ. 66 (6), 798–810. https://doi.org/10.1080/00380768.2020.1738899.
Islam, N., Rashid, MM, Pasandideh, F., Ray, B., Moore, S., Kadel, R., 2021. ການທົບທວນຄືນຂອງແອັບພລິເຄຊັນ ແລະເທັກໂນໂລຍີການສື່ສານສໍາລັບ Internet of Things (IoT) ແລະ
ຍານຍົນບໍ່ມີຄົນຂັບ (UAV) ອີງໃສ່ການປູກຝັງອັດສະລິຍະແບບຍືນຍົງ. ຄວາມຍືນຍົງ 13 (4), 1821. https://doi.org/10.3390/su13041821.
Jaud, M., Passot, S., Le Bivic, R., Delacourt, C., Grandjean, P., Le Dantec, N., 2016. ການປະເມີນຄວາມຖືກຕ້ອງຂອງຕົວແບບດ້ານດິຈິຕອລທີ່ມີຄວາມລະອຽດສູງ ຄິດໄລ່ໂດຍ
PhotoScan® ແລະ MicMac® ໃນເງື່ອນໄຂການສຳຫຼວດຍ່ອຍທີ່ດີທີ່ສຸດ. Remote Sensing 8 (6), https://doi.org/10.3390/rs8060465.
Jim'enez-Brenes, FM, Lopez-Granados, ´ F., Castro, AI, Torres-S' anchez, J., Serrano, N., Pena, ˜ JM, 2017. ການປະເມີນຜົນກະທົບຂອງການຕັດອອກຕໍ່ສະຖາປັດຕະຍະກຳຕົ້ນໝາກກອກເທດ ແລະ ປະຈໍາປີ. ການຂະຫຍາຍຕົວຂອງເຮືອນຍອດໂດຍໃຊ້ການສ້າງແບບຈໍາລອງ 3D ທີ່ອີງໃສ່ UAV. ວິທີການປູກ 13 (1). https://doi.org/10.1186/s13007-017-0205-3.
Jin, X., Liu, S., Baret, F., Hemerle'e, M., Comar, A., 2017. ການຄາດຄະເນຄວາມຫນາແຫນ້ນຂອງພືດຂອງພືດສາລີໃນເວລາເກີດຈາກຮູບພາບ UAV ລະດັບຄວາມສູງຕໍ່າຫຼາຍ. Sens ໄລຍະໄກ.
ສິ່ງແວດລ້ອມ. 198, 105–114. https://doi.org/10.1016/j.rse.2017.06.007.
Jinbo, C., Xiangliang, C., Han-Chi, F., Lam, A., 2019. ລະບົບການຕິດຕາມຜະລິດຕະພັນກະສິກໍາທີ່ສະຫນັບສະຫນູນໂດຍຄອມພິວເຕີ້ຟັງ. Cluster Comput. 22 (4), 8929–8938.
Ju, C., & Son, HI 2018a. ການປະເມີນຜົນຂອງລະບົບ UAV ຫຼາຍສໍາລັບການຮັບຮູ້ຫ່າງໄກສອກຫຼີກໃນການກະສິກໍາ. ການດໍາເນີນກອງປະຊຸມກ່ຽວກັບວິໄສທັດດ້ານຫຸ່ນຍົນ ແລະການປະຕິບັດການກະສິກໍາຢູ່ໃນກອງປະຊຸມສາກົນຂອງ IEEE ກ່ຽວກັບຫຸ່ນຍົນ ແລະອັດຕະໂນມັດ (ICRA), Brisbane, ອົດສະຕາລີ, 21-26.
Ju, C., Son, HI, 2018b. ຫຼາຍລະບົບ UAV ສໍາລັບຄໍາຮ້ອງສະຫມັກກະສິກໍາ: ການຄວບຄຸມ, ການປະຕິບັດ, ແລະການປະເມີນຜົນ. ເອເລັກໂຕຣນິກ 7 (9), 162. https://doi.org/10.3390/
ເອເລັກໂຕຣນິກ7090162.
Jung, J., Maeda, M., Chang, A., Bhandari, M., Ashapure, A., Landivar-Bowles, J., 2021. ທ່າແຮງຂອງການຮັບຮູ້ທາງໄກ ແລະປັນຍາປະດິດເປັນເຄື່ອງມືເພື່ອປັບປຸງ
ຄວາມຢືດຢຸ່ນຂອງລະບົບການຜະລິດກະສິກໍາ. Curr. ຄວາມຄິດເຫັນ. ເຕັກໂນໂລຊີຊີວະພາບ. 70, 15–22. https://doi.org/10.1016/j.copbio.2020.09.003.
Kalischuk, M., Paret, ML, Freeman, JH, Raj, D., Da Silva, S., Eubanks, S., Wiggins, DJ, Lollar, M., Marois, JJ, Mellinger, HC, Das, J. , 2019. ເຕັກນິກການສຳຫຼວດການປູກພືດທີ່ປັບປຸງໃຫ້ດີຂຶ້ນໄດ້ລວມເອົາການຖ່າຍພາບການປູກພືດແບບຫຼາຍສະເປັກທີ່ຊ່ວຍໃນການບິນທີ່ບໍ່ມີຄົນຂັບເຂົ້າໃນການປະຕິບັດການເຝົ້າລະວັງແບບດັ້ງເດີມສຳລັບການເກີດຮອຍແຕກຕາມລຳຕົ້ນຂອງໝາກໂມ. Plant Dis. 103 (7), 1642–1650.
Kapoor, KK, Tamilmani, K., Rana, NP, Patil, P., Dwivedi, YK, Nerur, S., 2018. ຄວາມກ້າວຫນ້າໃນການຄົ້ນຄວ້າສື່ມວນຊົນສັງຄົມ: ອະດີດ, ປະຈຸບັນແລະອະນາຄົດ. ແຈ້ງ. ລະບົບ. ດ້ານໜ້າ. 20
(3), 531-558.
Kerkech, M., Hafiane, A., Canals, R., 2020. VddNet: ເຄືອຂ່າຍກວດຫາພະຍາດເຄືອໄມ້ໂດຍອີງໃສ່ຮູບພາບຫຼາຍຊ່ອງ ແລະແຜນທີ່ຄວາມເລິກ. Remote Sensing 12 (20), 3305. https://doi. org/10.3390/rs12203305.
Khaliq, A., Comba, L., Biglia, A., Ricauda Aimonino, D., Chiaberge, M., Gay, P., 2019. ການປຽບທຽບຂອງດາວທຽມ ແລະຮູບພາບຫຼາຍຊ່ອງທີ່ອີງໃສ່ UAV ສໍາລັບສວນອະງຸ່ນ
ການປະເມີນການປ່ຽນແປງ. ການຮັບຮູ້ທາງໄກ 11 (4). https://doi.org/10.3390/rs11040436.
Khan, PW, Byun, Y.-C., Park, N., 2020. IoT-blockchain ໄດ້ເປີດໃຊ້ລະບົບການພິສູດທີ່ເໝາະສົມສໍາລັບອຸດສາຫະກໍາອາຫານ 4.0 ໂດຍໃຊ້ການຮຽນຮູ້ແບບເລິກເຊິ່ງຂັ້ນສູງ. ເຊັນເຊີ 20 (10), 2990.
Khan, RU, Khan, K., Albattah, W., Qamar, AM, Ullah, F., 2021. ການກວດຫາພະຍາດພືດຕາມຮູບພາບ: ຈາກການຮຽນຮູ້ເຄື່ອງຈັກແບບຄລາສສິກໄປຫາການເດີນທາງການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງ. Wireless Commun. ຄອມພິວເຕີມືຖື. 2021, 1–13.
Khan, S., Tufail, M., Khan, MT, Khan, ZA, Iqbal, J., Alam, M., Le, KNQ, 2021. A Novell semi-supervised framework for UAV based crop/weed classification. PLoS ONE 16 (5), e0251008.
Khanal, S., Fulton, J., Shearer, S., 2017. ສະພາບລວມຂອງຄໍາຮ້ອງສະຫມັກໃນປະຈຸບັນແລະທ່າແຮງຂອງການຮັບຮູ້ທາງໄກຄວາມຮ້ອນໃນກະສິກໍາຄວາມແມ່ນຍໍາ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ.
ກະເສດ. 139, 22–32. https://doi.org/10.1016/j.compag.2017.05.001.
Khanna, A., Kaur, S., 2019. Evolution of Internet of Things (IoT) ແລະຜົນກະທົບທີ່ສໍາຄັນຂອງມັນໃນພາກສະຫນາມຂອງ Precision Agriculture. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 157, 218–231.
Kim, W., Khan, GF, Wood, J., Mahmood, MT, 2016. ການມີສ່ວນພົວພັນຂອງພະນັກງານສໍາລັບອົງການຈັດຕັ້ງແບບຍືນຍົງ: ການວິເຄາະຄໍາຫລັກໂດຍນໍາໃຊ້ການວິເຄາະເຄືອຂ່າຍສັງຄົມແລະການລະເບີດ
ວິທີການກວດຫາ. ຄວາມຍືນຍົງ 8 (7), 631.
Kirsch, M., Lorenz, S., Zimmermann, R., Tusa, L., Mockel, ¨ R., Hodl, ¨ P., Booysen, R., Khodadadzadeh, M., Gloaguen, R., 2018. ການເຊື່ອມໂຍງ ຂອງດິນຟ້າອາກາດແລະ drone
ວິທີການຮັບຮູ້ hyperspectral ແລະ photogrammetric ສໍາລັບການສ້າງແຜນທີ່ການສໍາຫຼວດແລະການຕິດຕາມການຂຸດຄົ້ນບໍ່ແຮ່. ການຮັບຮູ້ທາງໄກ 10 (9), 1366. https://doi.org/10.3390/
rs10091366.
Kitano, BT, Mendes, CCT, Geus, AR, Oliveira, HC, Souza, JR, 2019. ການນັບຕົ້ນສາລີໂດຍໃຊ້ຮູບພາບການຮຽນຮູ້ເລິກເຊິ່ງ ແລະ UAV. IEEE Geosci. Sens ໄລຍະໄກ Lett. 1–5 https://doi.org/10.1109/LGRS.2019.2930549.
Koh, JCO, Spangenberg, G., Kant, S., 2021. ການຮຽນຮູ້ເຄື່ອງຈັກອັດຕະໂນມັດສຳລັບການພິມຮູບພືດທີ່ອີງໃສ່ພາບຜ່ານທາງສູງ. ການຮັບຮູ້ທາງໄກ 13 (5), 858. https://
doi.org/10.3390/rs13050858.
Kovalev, IV, Voroshilova, AA, 2020. ທ່າອ່ຽງເຕັກໂນໂລຢີທີ່ທັນສະໄຫມໃນການພັດທະນາລະບົບນິເວດຂອງ UAVs ສິນຄ້າ. J. Phys. Conf. ເຊີ. 1515 (5), 052068 https://doi. org/10.1088/1742-6596/1515/5/052068.
Krul, S., Pantos, C., Frangulea, M., Valente, J., 2021. Visual SLAM ສໍາລັບການລ້ຽງສັດໃນຮົ່ມ ແລະ ການລ້ຽງສັດໂດຍໃຊ້ drone ຂະຫນາດນ້ອຍທີ່ມີກ້ອງຖ່າຍຮູບ monocular: ການສຶກສາຄວາມເປັນໄປໄດ້.
Drones 5 (2), 41. https://doi.org/10.3390/drones5020041.
Kulbacki, M., Segen, J., Knie'c, W., Klempous, R., Kluwak, K., Nikodem, J., Kulbacka, J., Serester, A., 2018. ການສໍາຫຼວດຂອງ drones ສໍາລັບອັດຕະໂນມັດກະສິກໍາ ຈາກການປູກເພື່ອ
ການເກັບກ່ຽວ. ໃນ: INES 2018 – IEEE 22nd International Conference on Intelligent Engineering Systems, pp. 000353–358. https://doi.org/10.1109/INES.2018.8523943.
Lagkas, T., Argyriou, V., Bibi, S., Sarigiannidis, P., 2018. UAV IoT framework views and challenges: to protecting drones as “Things”. ເຊັນເຊີ 18 (11), 4015. https://doi.org/10.3390/s18114015.
Laliberte, AS, Rango, A., 2011. ຂັ້ນຕອນການປະມວນຜົນຮູບພາບ ແລະການຈັດປະເພດສໍາລັບການວິເຄາະຮູບພາບຍ່ອຍ decimeter ທີ່ໄດ້ມາກັບເຮືອບິນບໍ່ມີຄົນຂັບໃນໄລຍະແຫ້ງແລ້ງ
Rangelands. GISci. ທູດທາງໄກ 48 (1), 4–23. https://doi.org/10.2747/1548-1603.48.1.4.
Laliberte, AS, Rango, A., Herrick, JE, 2007. ຍານຍົນບໍ່ມີຄົນຂັບສຳລັບການສ້າງແຜນທີ່ ແລະການຕິດຕາມເຂດແດນ: ການປຽບທຽບສອງລະບົບ. ການດໍາເນີນກອງປະຊຸມປະຈໍາປີ ASPRS.
Lam, OHY, Dogotari, M., Prüm, M., Vithlani, HN, Roers, C., Melville, B., Zimmer, F., Becker, R., 2021. ຂັ້ນຕອນການເຮັດວຽກແບບເປີດສໍາລັບການສ້າງແຜນທີ່ຫຍ້າໃນພື້ນທີ່ຫຍ້າພື້ນເມືອງ
ການນໍາໃຊ້ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ: ການນໍາໃຊ້ Rumex obtusifolius ເປັນກໍລະນີສຶກສາ. ເອີ. J.Remote Sens. 54 (sup1), 71–88. https://doi.org/10.1080/22797254.2020.1793687.
Lambert, DM, Lowenberg-DeBoer, J., Griffin, TW, Peone, J., Payne, T., Daberkow, SG, 2004. ການຮັບຮອງເອົາ, ກໍາໄລ, ແລະການນໍາໃຊ້ທີ່ດີກວ່າຂອງຂໍ້ມູນກະສິກໍາທີ່ມີຄວາມແມ່ນຍໍາ.
ເຈ້ຍເຮັດວຽກ. ມະຫາວິທະຍາໄລ Purdue. https://doi.org/10.22004/ag.econ.28615.
Lelong, CCD, Burger, P., Jubelin, G., Roux, B., Labb'e, S., Baret, F., 2008. ການປະເມີນຮູບພາບຂອງຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບສໍາລັບການຕິດຕາມປະລິມານຂອງການປູກເຂົ້າສາລີໃນພື້ນທີ່ຂະຫນາດນ້ອຍ. ເຊັນເຊີ 8 (5), 3557–3585. https://doi.org/10.3390/s8053557.
Li, C., Niu, B., 2020. ການອອກແບບກະສິກໍາອັດສະລິຍະໂດຍອີງໃສ່ຂໍ້ມູນໃຫຍ່ ແລະອິນເຕີເນັດຂອງສິ່ງຕ່າງໆ. int. J. ແຈກຢາຍ. Sens. Netw. 16 (5) ttps://doi.org/10.1177/1550147720917065.
Li, W., Niu, Z., Chen, H., Li, D., Wu, M., Zhao, W., 2016. ການປະເມີນໄລຍະໄກຂອງຄວາມສູງຂອງເຮືອນຍອດ ແລະ ຊີວະມວນຂອງສາລີທີ່ຢູ່ເໜືອພື້ນດິນໂດຍໃຊ້ຮູບພາບສະເຕີຣິໂອຄວາມລະອຽດສູງຈາກ ລະບົບລົດຍົນບໍ່ມີຄົນຂັບລາຄາຖືກ. Ecol. Ind. 67, 637–648. https://doi.org/10.1016/j.ecolind.2016.03.036.
Liakos, KG, Busato, P., Moshou, D., Pearson, S., Bochtis, D., 2018. ການຮຽນຮູ້ເຄື່ອງຈັກໃນການກະສິກໍາ: ການທົບທວນຄືນ. ເຊັນເຊີ 18 (8), 2674.
Liebisch, F., Kirchgessner, N., Schneider, D., Walter, A., Hund, A., 2015. ໄລຍະໄກ, ການສະແດງລັກສະນະທາງອາກາດຂອງລັກສະນະສາລີດ້ວຍວິທີການຫຼາຍເຊັນເຊີມືຖື. ວິທີການປູກ 11 (1), 9. https://doi.org/10.1186/s13007-015-0048-8.
Lin, Z., Guo, W., 2020. Sorghum panicle detection and counting using a unmanned system images and deep learning. ດ້ານໜ້າ. ວິທະຍາສາດພືດ. 11.
Liu, S., Guo, L., Webb, H., Ya, X., Chang, X., 2019. Internet of Things ລະບົບການຕິດຕາມການກະສິກໍາແບບນິເວດທີ່ທັນສະໄຫມໂດຍອີງໃສ່ຄອມພິວເຕີ້ຟັງ. IEEE Access 7, 37050–37058.
Lopez-Granados, ´ F., 2011. ການກວດຫາວັດຊະພືດສໍາລັບການຄຸ້ມຄອງວັດສະພືດສະເພາະສະຖານທີ່: ການສ້າງແຜນທີ່ ແລະວິທີການໃນເວລາຈິງ. Weed Res. 51 (1), 1–11. https://doi.org/10.1111/j.1365-3180.2010.00829.x.
Lopez-Granados, ´ F., Torres-Sanchez, ´J., De Castro, A.-I., Serrano-P´erez, A., MesasCarrascosa, F.-J., Pena, ˜ J.-M. , 2016. ການກວດສອບຕົ້ນຫຍ້າຕາມວັດຖຸໃນການປູກພືດຫຍ້າໂດຍໃຊ້ຮູບພາບ UAV ຄວາມລະອຽດສູງ. ກະເສດ. ຍືນຍົງ. ນັກພັດທະນາ 36 (4), 1–12
Lopez-Granados, ´F., Torres-S´ anchez, J., Serrano-P´erez, A., de Castro, AI, MesasCarrascosa, F.-J., Pena, ˜ J.-M., 2016. ການສ້າງແຜນທີ່ວັດສະພືດໃນຕົ້ນລະດູດອກຕາເວັນໂດຍໃຊ້ເທັກໂນໂລຍີ UAV: ການປ່ຽນແປງຂອງແຜນທີ່ຢາຂ້າຫຍ້າຕໍ່ກັບເກນວັດສະພືດ. Precis. ກະເສດ. 17 (2), 183–199.
Lucieer, A., Malenovský, Z., Veness, T., Wallace, L., 2014. HyperUAS – imaging spectroscopy from a multirotor unmanned aircraft system. J. Field Rob. 31 (4),
571–590. https://doi.org/10.1002/rob.21508.
Lumme, J., Karjalainen, M., Kaartinen, H., Kukko, A., Hyyppa, ¨ J., Hyypp¨ a, H., Jaakkola, A., & Klemola, J., 2008. ການສະແກນເລເຊີເທິງບົກຂອງ ພືດກະສິກໍາ. ໃນ JJ
Chen J. Maas H–G. (Ed.), International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences—ISPRS Archives (ສະບັບທີ 37, ໜ້າ 563–566).
ສະມາຄົມສາກົນສໍາລັບການຖ່າຍຮູບແລະການຮັບຮູ້ທາງໄກ. https://www.scopus .com/inward/record.uri?eid=2-s2.0-84919356328&partnerID=40&md5=574
b802131a99d16318ce619a01ca1bf.
Ma, L., Li, M., Ma, X., Cheng, L., Du, P., Liu, Y., 2017. ການທົບທວນຄືນການຈັດປະເພດຮູບພາບພື້ນທີ່ປົກຄຸມດ້ວຍວັດຖຸ. ISPRS J. Photogramm. Sens ໄລຍະໄກ 130,
277–293. https://doi.org/10.1016/j.isprsjprs.2017.06.001.
Maes, WH, Steppe, K., 2019. ທັດສະນະສໍາລັບການຮັບຮູ້ທາງໄກກັບຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບໃນການກະສິກໍາທີ່ຊັດເຈນ. ແນວໂນ້ມພືດ Sci. 24 (2), 152–164. https://doi.org/10.1016/j.tplants.2018.11.007.
Maimaitijiang, M., Ghulam, A., Sidike, P., Hartling, S., Maimaitiyiming, M., Peterson, K., Shavers, E., Fishman, J., Peterson, J., Kadam, S., Burken, J., Fritschi, F., 2017.
ລະບົບການບິນບໍ່ມີຄົນຂັບ (UAS) ອີງໃສ່ phenotyping ຂອງຖົ່ວເຫຼືອງໂດຍໃຊ້ multi-sensor data fusion ແລະເຄື່ອງການຮຽນຮູ້ທີ່ສຸດ. ISPRS J. Photogramm. ທັດສະນະທາງໄກ 134, 43–58. https://doi.org/10.1016/j.isprsjprs.2017.10.011. Maimaitijiang, M., Sagan, V., Sidike, P., Daloye, AM, Erkbol, H., Fritschi, FB, 2020.
ການຕິດຕາມການປູກພືດໂດຍໃຊ້ຂໍ້ມູນດາວທຽມ/UAV fusion ແລະການຮຽນຮູ້ເຄື່ອງຈັກ. Remote Sensing 12 (9), 1357. https://doi.org/10.3390/rs12091357.
Manfreda, S., McCabe, M., Miller, P., Lucas, R., Pajuelo Madrigal, V., Mallinis, G., Ben Dor, E., Helman, D., Estes, L., Ciraolo, G. ., Müllerova, ´ J., Tauro, F., de Lima, M., de
Lima, J., Maltese, A., Frances, F., Caylor, K., Kohv, M., Perks, M., Ruiz-P'erez, G., Su, Z., Vico, G., Toth , B., 2018. ກ່ຽວກັບການນໍາໃຊ້ລະບົບທາງອາກາດທີ່ບໍ່ມີຄົນຂັບສໍາລັບ
ການຕິດຕາມກວດກາສິ່ງແວດລ້ອມ. ການຮັບຮູ້ທາງໄກ 10 (4), 641.
Marinko, RA, 1998. ການອ້າງອີງເຖິງວາລະສານການສຶກສາຂອງແມ່ຍິງໃນ dissertations, 1989 ແລະ The Serials Librarian 35 (1–2), 29–44. https://doi.org/10.1300/J123v35n01_
03.
Masroor, R., Naeem, M., Ejaz, W., 2021. ການຈັດການຊັບພະຍາກອນໃນເຄືອຂ່າຍໄຮ້ສາຍທີ່ມີການຊ່ວຍເຫຼືອ UAV: ທັດສະນະການເພີ່ມປະສິດທິພາບ. Ad Hoc Netw. 121, 102596 https://doi.org/10.1016/j.adhoc.2021.102596.
Matese, A., Di Gennaro, SF, 2018. ການປະຕິບັດການປະຕິບັດຂອງ multisensor UAV platform ໂດຍອີງໃສ່ multispectral, ຄວາມຮ້ອນແລະ RGB ຮູບພາບຄວາມລະອຽດສູງໃນຄວາມແມ່ນຍໍາ
ການປູກຝັງ. ການກະເສດ 8 (7), 116. https://doi.org/10.3390/agriculture8070116.
Matese, A., Di Gennaro, SF, 2021. ນອກເຫນືອຈາກດັດຊະນີ NDVI ແບບດັ້ງເດີມເປັນປັດໃຈຫຼັກທີ່ຈະນໍາໃຊ້ UAV ໃນການປູກພືດທີ່ມີຄວາມແມ່ນຍໍາ. ວິທະຍາສາດ. Rep. 11 (1), 2721. https://doi.org/10.1038/s41598-021-81652-3.
Matese, A., Toscano, P., Di Gennaro, SF, Genesio, L., Vaccari, FP, Primicerio, J., Belli, C., Zaldei, A., Bianconi, R., Gioli, B., 2015 .ການປຽບທຽບຂອງ UAV, ເຮືອບິນ
ແລະເວທີການຮັບຮູ້ທາງໄກຈາກດາວທຽມສໍາລັບ viticulture ທີ່ຊັດເຈນ. ການຮັບຮູ້ທາງໄກ 7 (3), 2971–2990. https://doi.org/10.3390/rs70302971.
Mazzia, V., Comba, L., Khaliq, A., Chiaberge, M., Gay, P., 2020. UAV ແລະການຮຽນຮູ້ເຄື່ອງຈັກໂດຍອີງໃສ່ດັດຊະນີພືດທີ່ຂັບເຄື່ອນດ້ວຍດາວທຽມເພື່ອຄວາມຊັດເຈນ
ກະສິກຳ. ເຊັນເຊີ 20 (9), 2530. https://doi.org/10.3390/s20092530.
McCain, KW, 1990. ການສ້າງແຜນທີ່ຜູ້ຂຽນໃນພື້ນທີ່ທາງປັນຍາ: ພາບລວມດ້ານວິຊາການ. J. ແອມ. Soc. ຂໍ້ມູນ. ວິທະຍາສາດ. 41 (6), 433–443.
Meinen, BU, Robinson, DT, 2021. ການສ້າງແບບຈໍາລອງການເຊາະເຈື່ອນທາງກະສິກໍາ: ການປະເມີນການຄາດເດົາການເຊາະເຈື່ອນຂອງພາກສະໜາມຂອງ USLE ແລະ WEPP ໂດຍໃຊ້ຂໍ້ມູນຊຸດເວລາຂອງ UAV. ສິ່ງແວດລ້ອມ. ຕົວແບບ. ຊອບແວ 137, 104962. https://doi.org/10.1016/j.envsoft.2021.104962.
Melville, B., Lucieer, A., Aryal, J., 2019. ການຈັດປະເພດຂອງຊຸມຊົນທົ່ງຫຍ້າພື້ນເມືອງໃນເຂດທົ່ງພຽງໂດຍໃຊ້ hyperspectral Unmanned Aircraft System (UAS) ຮູບພາບຢູ່ໃນ
ດິນແດນກາງຂອງ Tasmanian. ດອນ 3 (1), 5.
Messina, G., Modica, G., 2020. ການນຳໃຊ້ຮູບພາບຄວາມຮ້ອນຂອງ UAV ໃນການກະເສດທີ່ຊັດເຈນ: ສະພາບຂອງສິລະປະ ແລະ ການຄາດຄະເນການຄົ້ນຄວ້າໃນອະນາຄົດ. Remote Sensing 12 (9), https://doi.org/10.3390/rs12091491.
Mishra, D., Luo, Z., Jiang, S., Papadopoulos, T., Dubey, R., 2017. A bibliographic study on big data: concepts, trends and challenges. ການຄຸ້ມຄອງຂະບວນການທຸລະກິດ. J. 23 (3),
555†"573.
Mochida, K., Saisho, D., Hirayama, T., 2015. ການປັບປຸງການປູກພືດໂດຍໃຊ້ຊຸດຂໍ້ມູນຮອບວຽນຊີວິດທີ່ໄດ້ມາພາຍໃຕ້ເງື່ອນໄຂພາກສະຫນາມ. ດ້ານໜ້າ. ວິທະຍາສາດພືດ. 6 https://doi.org/10.3389/
fpls.2015.00740.
Mogili, UM.R., Deepak, BBVL, 2018. ການທົບທວນຄືນກ່ຽວກັບການນໍາໃຊ້ລະບົບ drone ໃນການກະສິກໍາຄວາມແມ່ນຍໍາ. ຄອມພິວເຕີ Procedia ວິທະຍາສາດ. 133, 502–509.
Moharana, S., Dutta, S., 2016. ການປ່ຽນແປງທາງກວ້າງຂອງພື້ນທີ່ຂອງເນື້ອໃນ chlorophyll ແລະໄນໂຕຣເຈນຂອງເຂົ້າຈາກຮູບພາບ hyperspectral. ISPRS J. Photogramm. ທັດສະນະທາງໄກ 122, 17–29.
Muangprathub, J., Boonnam, N., Kajornkasirat, S., Lekbangpong, N., Wanichsombat, A.,
Nillaor, P., 2019. IoT ແລະການວິເຄາະຂໍ້ມູນກະສິກໍາສໍາລັບ smart farm. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 156, 467–474.
Nansen, C., Elliott, N., 2016. ການຮັບຮູ້ໄລຍະໄກແລະການສະທ້ອນແສງໃນ entomology. ອານນູ. Rev. Entomol. 61 (1), 139–158. https://doi.org/10.1146/annurev-ento010715-023834.
Navia, J., Mondragon, I., Patino, D., Colorado, J., 2016. Multispectral mapping in Agriculture: terrain mosaic using an autonomous quadcopter UAV. int. Conf.
ລະບົບເຮືອບິນບໍ່ມີຄົນຂັບ. (ICUAS) 2016, 1351–1358. https://doi.org/10.1109/ ICUAS.2016.7502606.
Nayyar, A., Nguyen, B.-L., Nguyen, NG, 2020. ອິນເຕີເນັດຂອງສິ່ງຂອງ drone (Iodt): ອະນາຄົດຂອງ drones ອັດສະລິຍະ. Adv. Intel. ລະບົບ. ຄອມພິວເຕີ. 1045, 563–580. https://doi.org/10.1007/978-981-15-0029-9_45.
Nebiker, S., Annen, A., Scherrer, M., Oesch, D., 2008. ເຊັນເຊີ multispectral ນ້ຳໜັກເບົາສຳລັບ micro UAV—ໂອກາດສຳລັບການຮັບຮູ້ທາງໄກທາງອາກາດທີ່ມີຄວາມລະອຽດສູງຫຼາຍ. int. ໂຄ້ງ. ຖ່າຍຮູບ. Sens ໄລຍະໄກ. Inf. Sci 37 (B1), 1193–1200.
Negash, L., Kim, H.-Y., Choi, H.-L., 2019. ແອັບພລິເຄຊັ່ນ UAV ທີ່ເກີດຂຶ້ນໃໝ່ໃນກະສິກຳ. ໃນ: 2019 ກອງປະຊຸມສາກົນຄັ້ງທີ 7 ກ່ຽວກັບເຕັກໂນໂລຊີອັດສະລິຍະຫຸ່ນຍົນ ແລະ
ແອັບພລິເຄຊັນ (RiTA), ໜ້າ 254–257. https://doi.org/10.1109/RITAPP.2019.8932853.
Nerur, SP, Rasheed, AA, Natarajan, V., 2008. ໂຄງສ້າງທາງປັນຍາຂອງຂົງເຂດການຄຸ້ມຄອງຍຸດທະສາດ: ການວິເຄາະການອ້າງອິງຂອງຜູ້ຂຽນ. ຍຸດທະສາດ. ຈັດການ. J. 29 (3),
319†"336.
Neupane, K., Baysal-Gurel, F., 2021. ການກໍານົດອັດຕະໂນມັດ ແລະການຕິດຕາມພະຍາດພືດໂດຍໃຊ້ພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ: ການທົບທວນຄືນ. Remote Sensing 13 (19), 3841. https://doi.org/10.3390/rs13193841.
Nex, F., Remondino, F., 2014. UAV ສໍາລັບຄໍາຮ້ອງສະຫມັກແຜນທີ່ 3D: ການທົບທວນຄືນ. ແອັບ. Geomatics 6 (1), 1–15. https://doi.org/10.1007/s12518-013-0120-x.
Niu, H., Hollenbeck, D., Zhao, T., Wang, D., Chen, Y., 2020. ການຄາດຄະເນການລະບາຍອາກາດດ້ວຍ UAV ຂະໜາດນ້ອຍໃນການກະເສດທີ່ຊັດເຈນ. ເຊັນເຊີ 20 (22), 6427. https://
doi.org/10.3390/s20226427.
Osareh, F., 1996. Bibliometrics, Citation Analysis and Co-Citation Analysis. ການທົບທວນວັນນະຄະດີ I 46 (3), 149–158. https://doi.org/10.1515/libr.1996.46.3.149.
P´ adua, L., Vanko, J., Hruˇska, J., Ad˜ ao, T., Sousa, JJ, Peres, E., Morais, R., 2017. UAS, sensors, and data processing in agroforestry: ການທົບທວນຄືນຕໍ່ກັບຄໍາຮ້ອງສະຫມັກພາກປະຕິບັດ. int. J. Remote Sens. 38 (8–10), 2349–2391. https://doi.org/10.1080/01431161.2017.1297548.
Panday, ສະຫະລັດ, Pratihast, AK, Aryal, J., Kayastha, RB, 2020. ການທົບທວນຄືນກ່ຽວກັບການແກ້ໄຂຂໍ້ມູນໂດຍອີງໃສ່ drone ສໍາລັບພືດທັນຍາພືດ. Drones 4 (3), 1–29. https://doi.org/10.3390/
drones4030041.
Parsaeian, M., Shahabi, M., Hassanpour, H., 2020. ການປະເມີນປະລິມານນ້ຳມັນ ແລະທາດໂປຼຕີນຂອງເມັດງາໂດຍໃຊ້ການປະມວນຜົນຮູບພາບ ແລະເຄືອຂ່າຍປະສາດທຽມ. J. ແອມ. ນ້ຳມັນ
Soc ນັກເຄມີ 97 (7), 691–702.
Pena, ˜ JM, Torres-Sanchez, J., de Castro, AI, Kelly, M., Lopez-Granados, ´ F., Suarez, O., ການສ້າງແຜນທີ່ຫຍ້າໃນສວນສາລີຕົ້ນລະດູໂດຍໃຊ້ການວິເຄາະວັດຖຸ. ຂອງ
ຮູບພາບຍົນບໍ່ມີຄົນຂັບ (UAV). PLoS ONE 8 (10), e77151.
P'erez-Ortiz, M., Pena, ˜ JM, Guti'errez, PA, Torres-S' anchez, J., Herv' as-Martínez, C.,
Lopez-Granados, ´ F., 2015. ລະບົບເຄິ່ງຄວບຄຸມສຳລັບການສ້າງແຜນທີ່ເປັນວັດສະພືດໃນການປູກພືດດອກຕາເວັນໂດຍໃຊ້ພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ ແລະວິທີການກວດຈັບແຖວພືດ. ແອັບ. ຄອມພິວເຕີອ່ອນ. J. 37, 533–544. https://doi.org/10.1016/j.asoc.2015.08.027.
Pincheira, M., Vecchio, M., Giaffreda, R., Kanhere, SS, 2021. ອຸປະກອນ IoT ທີ່ມີລາຄາຖືກເປັນແຫຼ່ງຂໍ້ມູນທີ່ເຊື່ອຖືໄດ້ສໍາລັບລະບົບການຄຸ້ມຄອງນ້ໍາທີ່ໃຊ້ blockchain ໃນການກະສິກໍາຄວາມແມ່ນຍໍາ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 180, 105889.
Popescu, D., Stoican, F., Stamatescu, G., Ichim, L., Dragana, C., 2020. ລະບົບ UAV-WSN ຂັ້ນສູງສຳລັບການຕິດຕາມອັດສະລິຍະໃນກະສິກຳທີ່ຊັດເຈນ. ເຊັນເຊີ 20 (3), https://doi.org/10.3390/s20030817.
Pournader, M., Shi, Y., Seuring, S., Koh, SL, 2020. ຄໍາຮ້ອງສະຫມັກ Blockchain ໃນຕ່ອງໂສ້ການສະຫນອງ, ການຂົນສົ່ງແລະການຂົນສົ່ງ: ການທົບທວນຄືນລະບົບຂອງວັນນະຄະດີ. int. J. Prod. Res. 58 (7), 2063–2081.
Primicerio, J., Di Gennaro, SF, Fiorillo, E., Genesio, L., Lugato, E., Matese, A., Vaccari, FP, 2012. ຍານຍົນບໍ່ມີຄົນຂັບທີ່ມີຄວາມຍືດຫຍຸ່ນສໍາລັບການກະສິກໍາທີ່ຊັດເຈນ.
Precis. ກະເສດ. 13 (4), 517–523. https://doi.org/10.1007/s11119-012-9257-6.
Pritchard, A., 1969. ບັນນານຸກົມສະຖິຕິ ຫຼື bibliometrics. J. ເອກະສານ. 25 (4), 348–349.
Pudelko, R., Stuczynski, T., Borzecka-Walker, M., 2012. ຄວາມເຫມາະສົມຂອງຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ (UAV) ສໍາລັບການປະເມີນພື້ນທີ່ທົດລອງແລະການປູກພືດ. ການກະເສດ 99 (4), 431–436.
Puri, V., Nayyar, A., Raja, L., 2017. ເຮືອບິນ drones ການກະເສດ: ບາດກ້າວບຸກທະລຸທີ່ທັນສະ ໄໝ ໃນການກະເສດທີ່ຊັດເຈນ. J. ສະຖິຕິ. ຈັດການ. ລະບົບ. 20 (4), 507–518.
Radoglou-Grammatikis, P., Sarigiannidis, P., Lagkas, T., Moscholios, I., 2020. ການລວບລວມຄໍາຮ້ອງສະຫມັກ UAV ສໍາລັບການກະສິກໍາທີ່ຊັດເຈນ. ຄອມພິວເຕີ. ເນັດ. 172 ,
107148 https://doi.org/10.1016/j.comnet.2020.107148.
Ramesh, KV, Rakesh, V., Prakasa Rao, EVS, 2020. ການນຳໃຊ້ການວິເຄາະຂໍ້ມູນໃຫຍ່ ແລະປັນຍາປະດິດໃນການຄົ້ນຄວ້າກະສິກຳ. ອິນເດຍ J. Agron. 65 (4), 383–395.
Raparelli, E., Bajocco, S., 2019. ການວິເຄາະ bibliometric ກ່ຽວກັບການນໍາໃຊ້ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບໃນການສຶກສາກະສິກໍາແລະປ່າໄມ້. int. J. Remote Sens. 40 (24),
9070–9083. https://doi.org/10.1080/01431161.2019.1569793.
Rasmussen, J., Nielsen, J., Garcia-Ruiz, F., Christensen, S., Streibig, JC, Lotz, B., 2013.
ການນໍາໃຊ້ທ່າແຮງຂອງລະບົບເຮືອບິນບໍ່ມີຄົນຂັບຂະຫນາດນ້ອຍ (UAS) ໃນການຄົ້ນຄວ້າວັດສະພືດ. Weed Res. 53 (4), 242–248.
Rasmussen, J., Ntakos, G., Nielsen, J., Svensgaard, J., Poulsen, RN, Christensen, S., ແມ່ນດັດຊະນີພືດທີ່ມາຈາກກ້ອງລະດັບຜູ້ບໍລິໂພກທີ່ຕິດຕັ້ງຢູ່ເທິງ
UAVs ມີຄວາມຫນ້າເຊື່ອຖືພຽງພໍສໍາລັບການປະເມີນພື້ນທີ່ທົດລອງ? ເອີ. J. Agron. 74, 75–92. https://doi.org/10.1016/j.eja.2015.11.026.
Rejeb, A., Rejeb, K., Abdollahi, A., Zailani, S., Iranmanesh, M., Ghobakhloo, M., 2022. Digitalization in the food supply chains: a bibliometric review and key-route main path
ການວິເຄາະ. ຄວາມຍືນຍົງ 14 (1), 83. https://doi.org/10.3390/su14010083.
Rejeb, A., Rejeb, K., Simske, SJ, Treiblmaier, H., 2021a. Drones ສໍາລັບການຄຸ້ມຄອງລະບົບຕ່ອງໂສ້ການສະຫນອງແລະການຂົນສົ່ງ: ວາລະການທົບທວນແລະການຄົ້ນຄວ້າ. int. J. Logist. Res. ແອັບ.
1–24. https://doi.org/10.1080/13675567.2021.1981273.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021b. ເທກໂນໂລຍີ Blockchain ໃນການຂົນສົ່ງແລະການຄຸ້ມຄອງລະບົບຕ່ອງໂສ້ການສະຫນອງ: ການທົບທວນ bibliometric. Logistics 5 (4), 72.
https://doi.org/10.3390/logistics5040072.
Rejeb, A., Rejeb, K., Simske, S., Treiblmaier, H., 2021c. drones ມະນຸດສະທໍາ: ການທົບທວນຄືນແລະວາລະການຄົ້ນຄວ້າ. Internet of Things 16, 100434. https://doi.org/10.1016/j.
iot.2021.100434.
Rejeb, A., Treiblmaier, H., Rejeb, K., Zailani, S., 2021d. ການຄົ້ນຄວ້າ Blockchain ໃນການດູແລສຸຂະພາບ: ການທົບທວນ bibliometric ແລະແນວໂນ້ມການຄົ້ນຄວ້າໃນປະຈຸບັນ. J. ຂອງຂໍ້ມູນ, Inf. ແລະ
ຈັດການ. 3 (2), 109–124.
Rejeb, A., Simske, S., Rejeb, K., Treiblmaier, H., Zailani, S., 2020. ການຄົ້ນຄວ້າອິນເຕີເນັດຂອງສິ່ງຕ່າງໆໃນການຄຸ້ມຄອງລະບົບຕ່ອງໂສ້ການສະໜອງ ແລະການຂົນສົ່ງ: ການວິເຄາະ bibliometric. ອິນເຕີເນັດ
ຂອງສິ່ງທີ່ 12, 100318.
ReportLinker, 2021. ຕະຫຼາດ Drones ກະສິກຳທົ່ວໂລກຈະບັນລຸເຖິງ 15.2 ຕື້ໂດລາສະຫະລັດ ໂດຍຫ້ອງຂ່າວ YearGlobeNewswire. https://www.globenewswire.com/news-release/2021/08/10/2277986/0/en/Global-Agriculture-Drones-Market-to-Reach-US-15-2-Billion-by-the- ປີ 2027.html.
Ribeiro-Gomes, K., Hernandez-L ´ opez, ´ D., Ortega, JF, Ballesteros, R., Poblete, T.,Moreno, MA, 2017. ການປັບທຽບກ້ອງຄວາມຮ້ອນແບບບໍ່ເຢັນ ແລະ ການເພີ່ມປະສິດທິພາບຂອງກ້ອງຖ່າຍຮູບ.
ຂະບວນການ photogrammetry ສໍາລັບຄໍາຮ້ອງສະຫມັກ UAV ໃນກະສິກໍາ. ເຊັນເຊີ (ສະວິດເຊີແລນ) 17 (10). https://doi.org/10.3390/s17102173.
Rivera, MA, Pizam, A., 2015. ຄວາມກ້າວໜ້າໃນການຄົ້ນຄວ້າການຕ້ອນຮັບ: “ຈາກ Rodney Dangerfield ເຖິງ Aretha Franklin”. int. J. Contempor. ໂຮງໝໍ. ຈັດການ. 27 (3),
362–378. https://doi.org/10.1108/IJCHM-03-2014-0146.
Roldan, ´ JJ, Joossen, G., Sanz, D., Del Cerro, J., Barrientos, A., 2015. ລະບົບຄວາມຮູ້ສຶກທີ່ອີງໃສ່ Mini-UAV ສໍາລັບການວັດແທກຕົວແປສິ່ງແວດລ້ອມໃນເຮືອນແກ້ວ. ເຊັນເຊີ 15 (2), 3334–3350. https://doi.org/10.3390/s150203334.
Rozenberg, G., Kent, R., Blank, L., 2021. UAV ລະດັບຜູ້ບໍລິໂພກໃຊ້ເພື່ອກວດຫາ ແລະວິເຄາະຮູບແບບການແຜ່ກະຈາຍທາງກວ້າງຂອງພືດໃນລະດູທ້າຍໃນສວນຜັກບົ່ວທາງການຄ້າ. Precis. ກະເສດ. 22 (4), 1317–1332. https://doi.org/10.1007/s11119-021-09786-y.
Saari, H., Pellikka, I., Pesonen, L., Tuominen, S., Heikkila, ¨ J., Holmlund, C., Makynen, ¨ J., Ojala, K., Antila, T., 2011. Unmanned ຍານພາຫະນະທາງອາກາດ (UAV) ດໍາເນີນການລະບົບກ້ອງຖ່າຍຮູບ spectral ສໍາລັບການນໍາໃຊ້ປ່າໄມ້ແລະການກະສິກໍາ. ດໍາເນີນການ. SPIE – Int. Soc. ເລືອກ. ອັງ. 8174 https://doi.org/10.1117/12.897585.
Sah, B., Gupta, R., Bani-Hani, D., 2021. ການວິເຄາະອຸປະສັກໃນການປະຕິບັດການຂົນສົ່ງ drone. int. J. Logist. Res. ແອັບ. 24 (6), 531–550. https://doi.org/10.1080/
13675567.2020.1782862.
Saha, AK, Saha, J., Ray, R., Sircar, S., Dutta, S., Chattopadhyay, SP, & Saha, HN, IOT-based drone ສໍາລັບການປັບປຸງຄຸນນະພາບການປູກພືດໃນຂົງເຂດກະສິກໍາ. ໃນ SH
N. Chakrabarti S. (Ed.), 2018 IEEE 8th Annual Computing and Communication Workshop and Conference, CCWC 2018 (Vols. 2018-January, pp. 612–615). ສະຖາບັນ
of Electrical and Electronics Engineers Inc. doi: 10.1109/CCWC.2018.8301662.
Sai Vineeth, KV, Vara Prasad, YR, Dubey, SR, Venkataraman, H., 2019. LEDCOM: ການສື່ສານທີ່ອີງໃສ່ LED ທີ່ມີປະສິດຕິພາບແລະມີປະສິດທິພາບສໍາລັບການກະສິກໍາທີ່ຊັດເຈນ. IEEE Conf. ຂໍ້ມູນ. ຊຸມຊົນ. ເທັກໂນໂລຍີ. 2019, 1–5. https://doi.org/10.1109/CICT48419.2019.9066177.
Salamí, E., Barrado, C., Pastor, E., 2014. ການທົດລອງການບິນ UAV ນໍາໃຊ້ກັບຄວາມຮູ້ສຶກຫ່າງໄກສອກຫຼີກຂອງພື້ນທີ່ຜັກ. ການຮັບຮູ້ທາງໄກ 6 (11), 11051–11081. https://doi.org/10.3390/rs61111051.
Sankaran, S., Khot, LR, Espinoza, CZ, Jarolmasjed, S., Sathuvalli, VR, Vandemark, GJ, Miklas, PN, Carter, AH, Pumphrey, MO, Knowles, NRN, Pavek, MJ, 2015.
ລະບົບພາບຖ່າຍທາງອາກາດຄວາມລະອຽດສູງຕ່ໍາສໍາລັບການ phenotyping ແຖວແລະພາກສະຫນາມ: ການທົບທວນຄືນ. ເອີ. J. Agron. 70, 112–123. https://doi.org/10.1016/j.
eja.2015.07.004.
Santesteban, LG, Di Gennaro, SF, Herrero-Langreo, A., Miranda, C., Royo, JB, Matese, A., 2017. ການຖ່າຍຮູບຄວາມຮ້ອນທີ່ອີງໃສ່ UAV ຄວາມລະອຽດສູງເພື່ອຄາດຄະເນການ
ສະຖານະການນ້ຳຂອງພືດມີການປ່ຽນແປງໃນທັນທີ ແລະຕາມລະດູການ. ກະເສດ. ການຄຸ້ມຄອງນ້ໍາ. 183, 49–59. https://doi.org/10.1016/j.agwat.2016.08.026.
Sarli, CC, Dubinsky, EK, Holmes, KL, 2010. Beyond ciitation analysis: ຮູບແບບການປະເມີນຜົນກະທົບຂອງການຄົ້ນຄວ້າ. J. Med. ຫ້ອງສະໝຸດ : JMLA 98 (1), 17–23. https://doi.org/10.3163/1536-5050.98.1.008.
Schaepman, ME, Ustin, SL, Plaza, AJ, Painter, TH, Verrelst, J., Liang, S., 2009. ວິທະຍາສາດລະບົບໂລກທີ່ກ່ຽວຂ້ອງກັບ spectroscopy ການຖ່າຍຮູບ—ການປະເມີນ. ສະພາບແວດລ້ອມທາງໄກ. 113, S123–S137.
Schirrmann, M., Giebel, A., Gleiniger, F., Pflanz, M., Lentschke, J., Dammer, K.-H., 2016. ການຕິດຕາມຕົວກໍານົດການກະສິກໍາຂອງພືດ wheat ລະດູຫນາວດ້ວຍ UAV ລາຄາຖືກ
ຮູບພາບ. ການຮັບຮູ້ທາງໄກ 8 (9). https://doi.org/10.3390/rs8090706.
Schmale III, DG, Dingus, BR, Reinholtz, C., 2008. ການພັດທະນາ ແລະການນຳໃຊ້ເຮືອບິນບໍ່ມີຄົນຂັບແບບອັດຕະໂນມັດສຳລັບການເກັບຕົວຢ່າງທາງອາກາດທີ່ຊັດເຈນຂ້າງເທິງ.
ຂົງເຂດກະສິກໍາ. J. Field Rob. 25 (3), 133–147. https://doi.org/10.1002/rob.20232.
Shadrin, D., Menshchikov, A., Somov, A., Bornemann, G., Hauslage, J., Fedorov, M.,
ເຮັດໃຫ້ການກະເສດທີ່ມີຄວາມແມ່ນຍໍາຜ່ານການຮັບຮູ້ທີ່ຝັງຢູ່ດ້ວຍປັນຍາປະດິດ. IEEE Trans. ເຄື່ອງດົນຕີ. ມາດຕະການ. 69 (7), 4103–4113.
Shakhatreh, H., Sawalmeh, AH, Al-Fuqaha, A., Dou, Z., Almaita, E., Khalil, I.,
Othman, NS, Khreishah, A., Guizani, M., 2019. Unmanned Aerial Vehicles (UAVs): ແບບສຳຫຼວດກ່ຽວກັບການນຳໃຊ້ພົນລະເຮືອນ ແລະສິ່ງທ້າທາຍທີ່ສຳຄັນໃນການຄົ້ນຄວ້າ. IEEE Access 7,
48572–48634. https://doi.org/10.1109/ACCESS.2019.2909530.
Shakoor, N., Northrup, D., Murray, S., Mockler, TC, 2019. ການກະເສດທີ່ຂັບເຄື່ອນດ້ວຍຂໍ້ມູນໃຫຍ່: ການວິເຄາະຂໍ້ມູນໃຫຍ່ໃນການປັບປຸງພັນພືດ, genomics, ແລະການນໍາໃຊ້ການຮັບຮູ້ທາງໄກ
ເຕັກໂນໂລຊີທີ່ຈະກ້າວຫນ້າຜະລິດຕະພັນການປູກພືດ. Plant Phenome J. 2 (1), 1–8.
Sharma, BK, Chandra, G., Mishra, VP, 2019. ການວິເຄາະປຽບທຽບ ແລະຜົນສະທ້ອນຂອງ UAV ແລະ AI ໃນການສືບສວນດ້ານ Forensic. ໃນ: ການດຳເນີນງານ – 2019 Amity International
ກອງປະຊຸມກ່ຽວກັບປັນຍາປະດິດ. https://doi.org/10.1109/AICAI.2019.8701407.
Sharma, R., Shishodia, A., Gunasekaran, A., Min, H., Munim, ZH, 2022. ບົດບາດຂອງປັນຍາປະດິດໃນການຄຸ້ມຄອງລະບົບຕ່ອງໂສ້ການສະໜອງ: ການສ້າງແຜນທີ່ອານາເຂດ. int. ຈ.
ຜະລິດຕະພັນ. Res. 1–24. https://doi.org/10.1080/00207543.2022.2029611.
Shi, Y., Thomasson, JA, Murray, SC, Pugh, NA, Rooney, WL, Shafian, S., Rajan, N., Rouze, G., Morgan, CLS, Neely, HL, Rana, A., Bagavathiannan , MV ,
Henrickson, J., Bowden, E., Valasek, J., Olsenholler, J., Bishop, MP, Sheridan, R., Putman, EB, Popescu, S., Burks, T., Cope, D., Ibrahim, A., McCutchen, BF,
Baltensperger, DD, Avant, RV, Vidrine, M., Yang, C., Zhang, J., 2016. ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບສໍາລັບ phenotyping ທີ່ມີຄວາມໄວສູງແລະການຄົ້ນຄວ້າກະສິກໍາ. PLoS ONE
11 (7), e0159781.
Shuai, G., Martinez-Feria, RA, Zhang, J., Li, S., Price, R., Basso, B., 2019. ການເກັບເອົາສາລີທີ່ຢືນຢູ່ຕະຫຼອດເຂດຄວາມໝັ້ນຄົງຂອງຜົນຜະລິດໂດຍໃຊ້ອາກາດບໍ່ມີຄົນຂັບ
ພາຫະນະ (UAV). ເຊັນເຊີ 19 (20), 4446. https://doi.org/10.3390/s19204446.
Small, H., 1973. Co-citation in the scientific literature: a new measure of the relationship between two document. J. ແອມ. Soc. ຂໍ້ມູນ. ວິທະຍາສາດ. 24 (4), 265–269.
ຂະໜາດນ້ອຍ, H., Rorvig, ME, Lunin, LF, 1999. ການສ້າງພາບວິທະຍາສາດໂດຍການສ້າງແຜນທີ່ອ້າງອີງ. J. ແອມ. Soc. ຂໍ້ມູນ. ວິທະຍາສາດ. 50 (9), 799–813.
Soares, VHA, Ponti, MA, Gonçalves, RA, Campello, RJGB, 2021. ການນັບງົວໃນປ່າດ້ວຍຮູບພາບທາງອາກາດທີ່ຕັ້ງພູມສາດໃນເຂດທົ່ງຫຍ້າລ້ຽງສັດຂະຫນາດໃຫຍ່. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 189, 106354 https://doi.org/10.1016/j.compag.2021.106354.
Srivastava, K., Pandey, PC, Sharma, JK, 2020. ວິທີການສໍາລັບການເພີ່ມປະສິດທິພາບເສັ້ນທາງໃນການນໍາໃຊ້ການກະສິກໍາຄວາມແມ່ນຍໍາໂດຍໃຊ້ UAVs. Drones 4 (3), 58. https://doi.org/ 10.3390/drones4030058.
Stafford, JV, 2000. ການປະຕິບັດການກະເສດທີ່ຊັດເຈນໃນສະຕະວັດທີ 21. J. ກະເສດ. ອັງ. Res. 76 (3), 267–275.
Su, J., Coombes, M., Liu, C., Guo, L., Chen, W.-H., 2018. ການປະເມີນໄພແຫ້ງແລ້ງຂອງເຂົ້າສາລີໂດຍຮູບພາບການຮັບຮູ້ທາງໄກໂດຍໃຊ້ຍານຍົນບໍ່ມີຄົນຂັບ. ໃນປີ 2018 ກອງປະຊຸມຄວບຄຸມຈີນຄັ້ງທີ 37 (CCC).
Su, J., Liu, C., Coombes, M., Hu, X., Wang, C., Xu, X., Li, Q., Guo, L., Chen, W.-H., 2018. ການຕິດຕາມ rust yellow wheat ໂດຍການຮຽນຮູ້ຈາກຮູບພາບທາງອາກາດ UAV multispectral.
ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 155, 157–166. https://doi.org/10.1016/j. compag.2018.10.017.
Su, Y., Wang, X., 2021. ນະວັດຕະກໍາຂອງການຄຸ້ມຄອງເສດຖະກິດກະສິກໍາໃນຂະບວນການສ້າງກະສິກໍາ smart ໂດຍຂໍ້ມູນໃຫຍ່. ຄອມພິວເຕີແບບຍືນຍົງ. Inf. ລະບົບ. 31, 100579 https://doi.org/10.1016/j.suscom.2021.100579.
Sullivan, DG, Fulton, JP, Shaw, JN, Bland, GL, 2007. ການປະເມີນຄວາມອ່ອນໄຫວຂອງລະບົບທາງອາກາດ infrared ຄວາມຮ້ອນແບບບໍ່ມີຄົນຂັບເພື່ອກວດຫາຄວາມກົດດັນນ້ໍາໃນຜ້າຝ້າຍ. Trans. ASABE 50 (6), 1955–1962.
Sumesh, KC, Ninsawat, S., Som-ard, J., 2021. ການປະສົມປະສານຂອງດັດຊະນີພືດພັນທີ່ອີງໃສ່ RGB, ແບບຈໍາລອງດ້ານການປູກພືດ ແລະວິທີການວິເຄາະຮູບພາບທີ່ອີງໃສ່ວັດຖຸສໍາລັບການຄາດຄະເນຜົນຜະລິດຂອງອ້ອຍໂດຍໃຊ້ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 180, 105903 https://doi.org/10.1016/j.compag.2020.105903.
Suomalainen, J., Anders, N., Iqbal, S., Franke, J., Wenting, P., Bartholomeus, H., Becker, R., Kooistra, L., 2013. ລະບົບແຜນທີ່ hyperspectral ທີ່ມີນ້ໍາຫນັກເບົາສໍາລັບ
ຍານຍົນບໍ່ມີຄົນຂັບ—ຜົນທຳອິດ. ໃນ: 2013 ກອງປະຊຸມຄັ້ງທີ 5 ກ່ຽວກັບຮູບພາບ Hyperspectral ແລະການປະມວນຜົນສັນຍານ: Evolution in Remote Sensing (WHISPERS), ຫນ້າ 1–4. https://doi.org/10.1109/WHISPERS.2013.8080721.
Suomalainen, J., Anders, N., Iqbal, S., Roerink, G., Franke, J., Wenting, P., Hünniger, D., Bartholomeus, H., Becker, R., Kooistra, L., 2014. A hyperspectral lightweight
ລະບົບແຜນທີ່ແລະລະບົບຕ່ອງໂສ້ການປຸງແຕ່ງ photogrammetric ສໍາລັບຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບ. ການຮັບຮູ້ທາງໄກ 6 (11), 11013–11030. https://doi.org/10.3390/
rs61111013.
Syeda, IH, Alam, MM, Illahi, U., Su'ud, MM, 2021. ຍຸດທະສາດການຄວບຄຸມລ່ວງໜ້າໂດຍໃຊ້ການປະມວນຜົນຮູບພາບ, UAV ແລະ AI ໃນກະສິກຳ: ການທົບທວນຄືນ. ໂລກ J. Eng. 18 (4),
579–589. https://doi.org/10.1108/WJE-09-2020-0459.
Tahai, A., Rigsby, JT, 1998. ການປະມວນຜົນຂໍ້ມູນໂດຍໃຊ້ການອ້າງອີງເພື່ອສືບສວນອິດທິພົນຂອງວາລະສານໃນການບັນຊີ. Inf. ຂະບວນການ. ຈັດການ. 34 (2–3), 341–359.
Tang, Y., Dananjayan, S., Hou, C., Guo, Q., Luo, S., He, Y., 2021. ການສໍາຫຼວດກ່ຽວກັບເຄືອຂ່າຍ 5G ແລະຜົນກະທົບທາງດ້ານກະສິກໍາ: ສິ່ງທ້າທາຍ ແລະໂອກາດ. ຄອມພິວເຕີ.
ເອເລັກໂຕຣນິກ. ກະເສດ. 180, 105895 https://doi.org/10.1016/j.compag.2020.105895.
Tantalaki, N., Souravlas, S., Roumeliotis, M., 2019. ການຕັດສິນໃຈທີ່ຂັບເຄື່ອນດ້ວຍຂໍ້ມູນໃນການກະເສດທີ່ຊັດເຈນ: ການເພີ່ມຂຶ້ນຂອງຂໍ້ມູນໃຫຍ່ໃນລະບົບກະສິກໍາ. J. ກະເສດ. ຂໍ້ມູນອາຫານ.
20 (4), 344–380.
Tao, H., Feng, H., Xu, L., Miao, M., Yang, G., Yang, X., Fan, L., 2020. ການຄາດຄະເນຜົນຜະລິດແລະຄວາມສູງຂອງພືດຂອງ wheat ລະດູຫນາວໂດຍໃຊ້ UAV- ຮູບພາບ hyperspectral ທີ່ອີງໃສ່.
ເຊັນເຊີ 20 (4), 1231.
Techy, L., Schmale III, DG, Woolsey, CA, 2010. ການເກັບຕົວຢ່າງທາງອາກາດແບບປະສານງານຂອງເຊື້ອພະຍາດພືດໃນບັນຍາກາດຕ່ໍາໂດຍໃຊ້ຍານອາວະກາດທີ່ບໍ່ມີຄົນຂັບ 27 ລຳ. J. Field Rob. 3 (335), 343–10.1002. https://doi.org/20335/rob.XNUMX.
Tetila, EC, Machado, BB, Astolfi, G., Belete, NAdS, Amorim, WP, Roel, AR, Pistori, H., 2020. ການກວດຫາ ແລະຈັດປະເພດສັດຕູພືດຖົ່ວເຫຼືອງ ໂດຍໃຊ້ການຮຽນຮູ້ຢ່າງເລິກເຊິ່ງ
ດ້ວຍຮູບພາບ UAV. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 179, 105836.
Thamm, H.-P., Menz, G., Becker, M., Kuria, DN, Misana, S., Kohn, D., 2013. ການນໍາໃຊ້ UAs ສໍາລັບການປະເມີນລະບົບກະສິກໍາໃນເຂດພື້ນທີ່ຊຸ່ມໃນ Tanzania ໃນ— ແລະ WetSeason ສໍາລັບການກະສິກໍາແບບຍືນຍົງແລະການສະຫນອງຄວາມຈິງພື້ນຖານສໍາລັບຂໍ້ມູນ Terra-Sar X. ໃນ: ISPRS – International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, ໜ້າ 401–406. https://doi.org/10.5194/isprsarchivesXL-1-W2-401-2013.
Thelwall, M., 2008. Bibliometrics to webometrics. J. ຂໍ້ມູນ ວິທະຍາສາດ. 34 (4), 605–621.
Torres-Sanchez, ´ J., Lopez-Granados, ´ F., Pena, ˜ JM, 2015. ວິທີການທີ່ອີງໃສ່ວັດຖຸອັດຕະໂນມັດສໍາລັບການກໍານົດຂອບເຂດທີ່ດີທີ່ສຸດໃນຮູບພາບ UAV: ຄໍາຮ້ອງສະຫມັກສໍາລັບການກວດພົບພືດໃນພືດຫຍ້າ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 114, 43–52. https://doi.org/10.1016/j.compag.2015.03.019.
Torres-Sanchez, ´J., Lopez-Granados, ´ F., Serrano, N., Arquero, O., Pena, ˜ JM, Hassan, QK, 2015. ການຕິດຕາມ 3-D ສູງຂອງການປູກຕົ້ນໄມ້ກະສິກໍາກັບ ເທັກໂນໂລຍີຍານຍົນບໍ່ມີຄົນຂັບ (UAV). PLoS ONE 10 (6), e0130479.
Torres-Sanchez, ´ J., Pena, ˜ JM, de Castro, AI, Lopez-Granados, ´ F., 2014. ການສ້າງແຜນທີ່ຫຼາຍຊ່ວງເວລາຂອງສ່ວນຂອງພືດໃນທົ່ງສາລີຕົ້ນລະດູໂດຍໃຊ້ຮູບພາບຈາກ UAV. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 103, 104–113. https://doi.org/10.1016/j. compag.2014.02.009.
Tsouros, DC, Bibi, S., Sarigiannidis, PG, 2019. ການທົບທວນຄືນກ່ຽວກັບຄໍາຮ້ອງສະຫມັກທີ່ອີງໃສ່ UAV ສໍາລັບກະສິກໍາຄວາມແມ່ນຍໍາ. ຂໍ້ມູນ (ສະວິດເຊີແລນ) 10 (11). https://doi.org/10.3390/info10110349.
Tu, Y.-H., Phinn, S., Johansen, K., Robson, A., Wu, D., 2020. ການວາງແຜນການບິນ drone ທີ່ດີທີ່ສຸດສໍາລັບການວັດແທກໂຄງສ້າງການປູກພືດສວນ. ISPRS J. Photogramm.
ຄວາມຮູ້ສຶກທາງໄກ 160, 83–96. https://doi.org/10.1016/j.isprsjprs.2019.12.006
Tzounis, A., Katsoulas, N., Bartzanas, T., Kittas, C., 2017. ອິນເຕີເນັດຂອງສິ່ງຕ່າງໆໃນກະສິກໍາ, ຄວາມກ້າວຫນ້າທີ່ຜ່ານມາແລະສິ່ງທ້າທາຍໃນອະນາຄົດ. ຊີວະວິທະຍາ. ອັງ. 164, 31–48.
https://doi.org/10.1016/j.biosystemseng.2017.09.007.
Uddin, A., Singh, VK, Pinto, D., Olmos, I., 2015. ແຜນທີ່ວິທະຍາສາດຂອງການຄົ້ນຄວ້າວິທະຍາສາດຄອມພິວເຕີໃນເມັກຊິໂກ. ວິທະຍາສາດ 105 (1), 97–114.
UN., 2019. ຄວາມສົດໃສດ້ານປະຊາກອນໂລກ 2019. https://population.un.org/wpp/ (ເຂົ້າໃຊ້ໃນວັນທີ 15/04/2022).
Uto, K., Seki, H., Saito, G., Kosugi, Y., 2013. ລັກສະນະການປູກເຂົ້າໂດຍລະບົບເຊັນເຊີຂະໜາດນ້ອຍ UAVmounted hyperspectral. IEEE J. Sel. ເທິງ. ແອັບ. ໂລກ Obs.
Remote Sens. 6 (2), 851–860. https://doi.org/10.1109/JSTARS.2013.2250921. van der Merwe, D., Burchfield, DR, Witt, TD, ລາຄາ, KP, Sharda, A., 2020. Drones ໃນ
ກະສິກຳ. Adv. ກະເສດ. 162, 1–30.
Velusamy, P., Rajendran, S., Mahendran, RK, Naseer, S., Shafiq, M., Choi, J.-G., 2022.
ຍານຍົນບໍ່ມີຄົນຂັບ (UAV) ໃນການກະສິກໍາທີ່ຊັດເຈນ: ຄໍາຮ້ອງສະຫມັກແລະສິ່ງທ້າທາຍ. ພະລັງງານ 15 (1), 217. https://doi.org/10.3390/en15010217.
Ventura, D., Bonifazi, A., Gravina, MF, Belluscio, A., Ardizzone, G., 2018. ການສ້າງແຜນທີ່ ແລະການຈັດປະເພດທີ່ຢູ່ອາໄສທາງທະເລທີ່ລະອຽດອ່ອນທາງລະບົບນິເວດໂດຍໃຊ້ອາກາດບໍ່ມີຄົນຂັບ
ຮູບພາບຍານພາຫະນະ (UAV) ແລະການວິເຄາະຮູບພາບທີ່ອີງໃສ່ວັດຖຸ (OBIA). Remote Sensing 10 (9), 1331. https://doi.org/10.3390/rs10091331.
Verger, A., Vigneau, N., Ch´eron, C., Gilliot, J.-M., Comar, A., Baret, F., 2014. ດັດຊະນີພື້ນທີ່ສີຂຽວຈາກລະບົບທາງອາກາດທີ່ບໍ່ມີຄົນຂັບຫຼາຍກວ່າເຂົ້າສາລີ ແລະ ພືດ rapeseed . ສະພາບແວດລ້ອມທາງໄກ. 152, 654–664. https://doi.org/10.1016/j.rse.2014.06.006.
Von Bueren, SK, Burkart, A., Hueni, A., Rascher, U., Tuohy, MP, Yule, IJ, 2015. ນຳໃຊ້ເຊັນເຊີ UAV-based optical ສີ່ໜ່ວຍ ຢູ່ເທິງທົ່ງຫຍ້າ: ສິ່ງທ້າທາຍ ແລະ
ຂໍ້ຈໍາກັດ. ຊີວະວິທະຍາ 12 (1), 163–175. https://doi.org/10.5194/bg-12-163-2015.
Vuran, MC, Salam, A., Wong, R., Irmak, S., 2018. ອິນເຕີເນັດຂອງສິ່ງທີ່ຢູ່ໃຕ້ດິນໃນການກະສິກໍາຄວາມແມ່ນຍໍາ: ດ້ານສະຖາປັດຕະຍະກໍາແລະເຕັກໂນໂລຢີ. Ad Hoc Netw. 81,
160–173. https://doi.org/10.1016/j.adhoc.2018.07.017.
Wamba, SF, Queiroz, MM, 2021. ປັນຍາປະດິດທີ່ຮັບຜິດຊອບເປັນສ່ວນປະກອບລັບສໍາລັບສຸຂະພາບດິຈິຕອນ: ການວິເຄາະ bibliometric, ຄວາມເຂົ້າໃຈ, ແລະທິດທາງການຄົ້ນຄວ້າ.
ຂໍ້ມູນ. ລະບົບ. ດ້ານໜ້າ. 1–16.
Wang, L., Zhang, G., Wang, Z., Liu, J., Shang, J., Liang, L., 2019. ການວິເຄາະ Bibliometric ຂອງແນວໂນ້ມການຄົ້ນຄວ້າການຮັບຮູ້ທາງໄກໃນການຕິດຕາມການເຕີບໂຕຂອງພືດ: ກໍລະນີສຶກສາໃນປະເທດຈີນ. ການຮັບຮູ້ທາງໄກ 11 (7). https://doi.org/10.3390/rs11070809.
ສີຂາວ, HD, Griffith, BC, 1981. ຜູ້ຂຽນ cocitation: ການວັດແທກວັນນະຄະດີຂອງໂຄງສ້າງທາງປັນຍາ. J. ແອມ. Soc. ຂໍ້ມູນ. ວິທະຍາສາດ. 32 (3), 163–171.
Xiang, H., Tian, L., 2011. ການພັດທະນາລະບົບການຮັບຮູ້ທາງໄກກະສິກໍາທີ່ມີລາຄາຖືກໂດຍອີງໃສ່ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບອັດຕະໂນມັດ (UAV). ຊີວະວິທະຍາ. ອັງ. 108 (2), 174–190. https://doi.org/10.1016/j.biosystemseng.2010.11.010.
Xie, C., Yang, C., 2020. ການທົບທວນຄືນກ່ຽວກັບລັກສະນະ phenotyping ທີ່ມີຄວາມໄວສູງຂອງພືດໂດຍໃຊ້ເຊັນເຊີ UAV. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 178, 105731 https://doi.org/10.1016/j.
compag.2020.105731.
Yao, H., Qin, R., Chen, X., 2019. ຍານຍົນບໍ່ມີຄົນຂັບສຳລັບແອັບພລິເຄຊັນການຮັບຮູ້ທາງໄກ—ການທົບທວນ. ການຮັບຮູ້ທາງໄກ 11 (12). https://doi.org/10.3390/
rs11121443.
Yeom, S., 2021. ການເຄື່ອນຍ້າຍຄົນຕິດຕາມ ແລະການຕິດຕາມທີ່ບໍ່ຖືກຕ້ອງ ດ້ວຍການຖ່າຍພາບຄວາມຮ້ອນອິນຟາເຣດໂດຍມັລຕິຣອດເຕີ. Drones 5 (3), 65. https://doi.org/10.3390/drones5030065.
Yue, J., Feng, H., Jin, X., Yuan, H., Li, Z., Zhou, C., Yang, G., Tian, Q., 2018. ການປຽບທຽບການປະເມີນຕົວກໍານົດການການປູກພືດໂດຍໃຊ້ຮູບພາບ ຈາກ UAV-mounted
ເຊັນເຊີ hyperspectral snapshot ແລະກ້ອງຖ່າຍຮູບດິຈິຕອນຄວາມລະອຽດສູງ. Remote Sensing 10 (7), 1138. https://doi.org/10.3390/rs10071138.
Yue. ພາບຖ່າຍໂດຍອີງໃສ່
ເຊັນເຊີ hyperspectral ແລະຄວາມສູງຂອງການປູກພືດແບບປັບປຸງ. ການຮັບຮູ້ທາງໄກ 9 (7). https://doi.org/10.3390/rs9070708.
Zahawi, RA, Dandois, JP, Holl, KD, Nadwodny, D., Reid, JL, Ellis, EC, 2015. ການນໍາໃຊ້ຍານພາຫະນະທາງອາກາດທີ່ບໍ່ມີຄົນຂັບນ້ໍາຫນັກເບົາເພື່ອຕິດຕາມການຟື້ນຕົວຂອງປ່າເຂດຮ້ອນ. ຊີວະພາບ.
ອະນຸລັກ. 186, 287–295. https://doi.org/10.1016/j.biocon.2015.03.031. Zamora-Izquierdo, MA, Santa, J., Martínez, JA, Martínez, V., Skarmeta, AF, 2019.
ແພລະຕະຟອມ IoT ກະສິກໍາອັດສະລິຍະໂດຍອີງໃສ່ຄອມພິວເຕີ້ຂອບແລະຄລາວ. ຊີວະວິທະຍາ. ອັງ. 177,
4†"17.
Zarco-Tejada, PJ, Diaz-Varela, R., Angileri, V., Loudjani, P., 2014. ການວັດແທກລະດັບຄວາມສູງຂອງຕົ້ນໄມ້ໂດຍໃຊ້ຮູບພາບຄວາມລະອຽດສູງຫຼາຍທີ່ໄດ້ມາຈາກອາກາດບໍ່ມີຄົນຂັບ
ຍານພາຫະນະ (UAV) ແລະວິທີການສ້າງຮູບ 3D ອັດຕະໂນມັດ. ເອີ. J. Agron. 55, 89–99. https://doi.org/10.1016/j.eja.2014.01.004.
Zhang, C., Craine, WA, McGee, RJ, Vandemark, GJ, Davis, JB, Brown, J., Hulbert, SH, Sankaran, S., 2020. ການຈັດລຽງຕາມຮູບພາບຂອງຄວາມເຂັ້ມຂອງການອອກດອກໃນພືດລະດູໜາວ. ເຊັນເຊີ 20 (5), 1450. https://doi.org/10.3390/s20051450.
Zhang, C., Kovacs, JM, 2012. ການນໍາໃຊ້ລະບົບທາງອາກາດບໍ່ມີຄົນຂັບຂະຫນາດນ້ອຍສໍາລັບການກະສິກໍາຄວາມແມ່ນຍໍາ: ການທົບທວນຄືນ. Precis. ກະເສດ. 13 (6), 693–712. https://doi.org/
10.1007/s11119-012-9274-5.
Zhang, L., Zhang, H., Niu, Y., Han, W., 2019. ການສ້າງແຜນທີ່ຄວາມກົດດັນນ້ໍາສາລີໂດຍອີງໃສ່ການຮັບຮູ້ທາງໄກຫຼາຍຊ່ອງ UAV. ການຮັບຮູ້ທາງໄກ 11 (6), 605.
Zhang, X., Han, L., Dong, Y., Shi, Y., Huang, W., Han, L., Gonz´ alez-Moreno, P., Ma, H., Ye, H., Sobeih , T. , 2019. ວິທີການຮຽນຮູ້ແບບເລິກເຊິ່ງສໍາລັບ rust ສີເຫຼືອງອັດຕະໂນມັດ
ການກວດຫາພະຍາດຈາກຮູບພາບ UAV ທີ່ມີຄວາມລະອຽດສູງ. ການຮັບຮູ້ທາງໄກ 11 (13), 1554.
Zhao, X., Zhang, J., Huang, Y., Tian, Y., Yuan, L., 2022. ການກວດຫາ ແລະຈໍາແນກຄວາມຄຽດຂອງພະຍາດ ແລະແມງໄມ້ຂອງພືດຊາໂດຍໃຊ້ຮູບພາບ hyperspectral ສົມທົບກັບການວິເຄາະ wavelet. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 193, 106717 https://doi.org/10.1016/j. compag.2022.106717.
Zheng, A., Wang, M., Li, C., Tang, J., Luo, B., 2022. Entropy guided adversarial domain adaptation for aerial image semantic segmentation. IEEE Trans. ກ
Zheng, H., Cheng, T., Yao, X., Deng, X., Tian, Y., Cao, W., Zhu, Y., 2016. ການກວດພົບ phenology ເຂົ້າຜ່ານການວິເຄາະໄລຍະເວລາຂອງ spectral ພື້ນດິນ ດັດຊະນີຂໍ້ມູນ. ການປູກພືດສວນ Res. 198, 131–139. https://doi.org/10.1016/j.fcr.2016.08.027.
Zheng, J., Yang, W., 2018. ການອອກແບບລະບົບການຮົ່ວໄຫຼທາງດ້ານກະສິກໍາທີ່ຊັດເຈນໂດຍອີງໃສ່ເຊັນເຊີໄຮ້ສາຍ. int. J. ອອນໄລນ໌ Eng. 14 (05), 184 .
Zhou, L., Gu, X., Cheng, S., Yang, G., Shu, M., Sun, Q., 2020. ການວິເຄາະການປ່ຽນແປງຄວາມສູງຂອງພືດສາລີທີ່ນອນຢູ່ໂດຍໃຊ້ຂໍ້ມູນ UAV-LiDAR. ການກະເສດ 10 (5), 146. https://
doi.org/10.3390/agriculture10050146.
Zhou, S., Chai, X., Yang, Z., Wang, H., Yang, C., Sun, T., 2021. Maize-IAS: ຊອບແວການວິເຄາະຮູບພາບຂອງສາລີໂດຍໃຊ້ການຮຽນຮູ້ແບບເລິກເຊິ່ງສໍາລັບ phenotyping ພືດທີ່ມີຜົນຜະລິດສູງ. . ວິທີການປູກ 17 (1), 48. https://doi.org/10.1186/s13007-021-00747-0.
Zhou, X., Zheng, HB, Xu, XQ, He, JY, Ge, XK, Yao, X., Cheng, T., Zhu, Y., Cao, WX, Tian, YC, 2017. ຄາດຄະເນຜົນຜະລິດເມັດພືດໃນ ເຂົ້າທີ່ນຳໃຊ້ພືດພັນຊົ່ວຄາວ
ດັດຊະນີຈາກ UAV-based multispectral ແລະຮູບພາບດິຈິຕອນ. ISPRS J. Photogramm. ຄວາມຮູ້ສຶກທາງໄກ 130, 246–255. https://doi.org/10.1016/j.isprsjprs.2017.05.003.
Zhou, Y., Xie, Y., Shao, L., 2016. ການຈໍາລອງເຕັກໂນໂລຢີຫຼັກຂອງລະບົບເຝົ້າລະວັງເຮືອນແກ້ວໂດຍອີງໃສ່ເຄືອຂ່າຍເຊັນເຊີໄຮ້ສາຍ. int. J. ອອນໄລນ໌ Eng. 12 (05),
43.
Zhou, Z., Majeed, Y., Diverres Naranjo, G., Gambacorta, EMT, 2021. ການປະເມີນຄວາມເຄັ່ງຕຶງຂອງນໍ້າໃນການປູກພືດດ້ວຍຮູບພາບຄວາມຮ້ອນອິນຟາເຣດໃນການກະສິກໍາທີ່ຊັດເຈນ: ການທົບທວນຄືນ
ແລະຄວາມສົດໃສດ້ານໃນອະນາຄົດສໍາລັບຄໍາຮ້ອງສະຫມັກການຮຽນຮູ້ເລິກ. ຄອມພິວເຕີ. ເອເລັກໂຕຣນິກ. ກະເສດ. 182, 106019 https://doi.org/10.1016/j.compag.2021.106019.

{kind=link}